 kutluhan_aktar
kutluhan_aktarIn most cases, conducting only surface-level water quality tests is insufficient to pinpoint the hiding pollutants since contaminants can form in the underwater substrate by the accumulation of the incipient chemical agents. These underwater chemical reactions are commonly instigated by detritus, industrial effluents, and toxic sediment rife in the underwater substrate. After the culmination of the sinking debris, these reactions can engender algal blooms, hypoxia (dead zones), and expanding barren lands[1]. Since the mentioned occurrences are only the result of prolonged water pollution, they lead to the inexorable progress of complex toxic chemical interactions, even with plastic debris[2]. Therefore, the precedence must be given to identifying the underlying conditions of increasing underwater chemical reactions.
Especially in lower substrate levels, before reaching hazardous amounts, the combined chemical reactions between pollutants yield ample gas molecules enough to accumulate small-to-moderate air bubbles underwater. These lurking gas pockets affect aquatic plant root systems, deliver noxious contaminants to the surface level, and alter water quality unpredictably due to prevalent emerging contaminants. As a result of the surge of toxic air gaps, the affected water body can undergo sporadic aquatic life declines, starting with invertebrate and fry (or hatchling) deaths. Although not all instances of underwater air bubble activity can be singled out as an imminent toxic pollution risk, they can be utilized as a vital indicator to test water quality to preclude any potential environmental hazards.
In addition to protecting natural enclosed water bodies, detecting the accumulating underwater pollutants can also be beneficial and profitable for commercial aquatic animal breeding or plant harvesting, widely known as aquaculture. Since aquaculture requires the controlled cultivation of aquatic organisms in artificially enclosed water bodies (freshwater or brackish water), such as fish ponds and aquariums, the inflation of underwater air bubbles transferring noxious pollutants to the surface can engender sudden animal deaths, wilting aquatic plants, and devastating financial losses. Especially for fish farming or pisciculture involving more demanding species, the accumulating air bubbles in the underwater substrate can initiate a chain reaction resulting in the loss of all fish acclimatized to the enclosed water body. In severe cases, this can lead to algae-clad artificial environments threatening terrestrial animals and the incessant decline in survival rates.
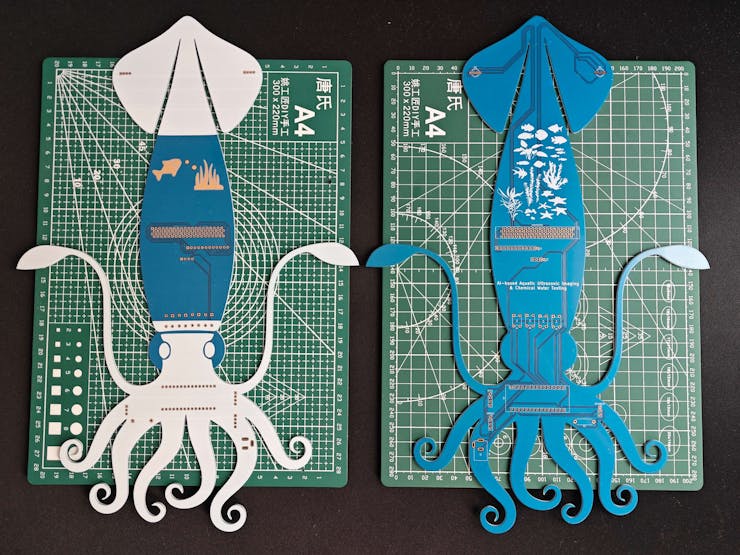
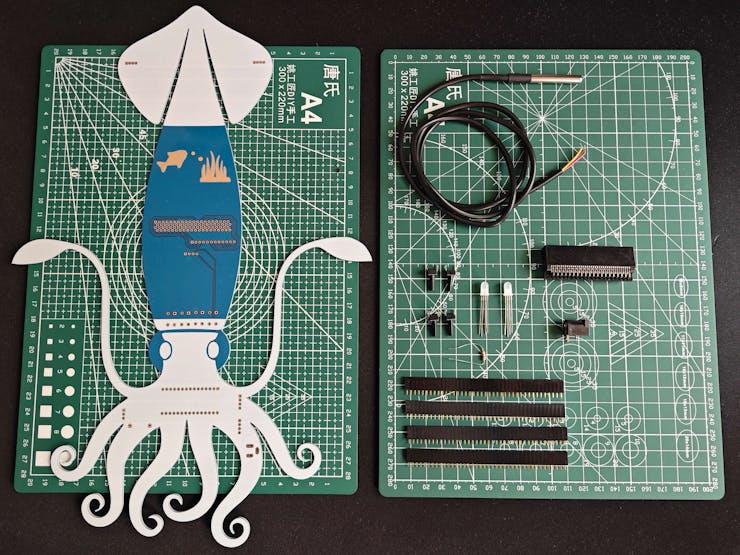
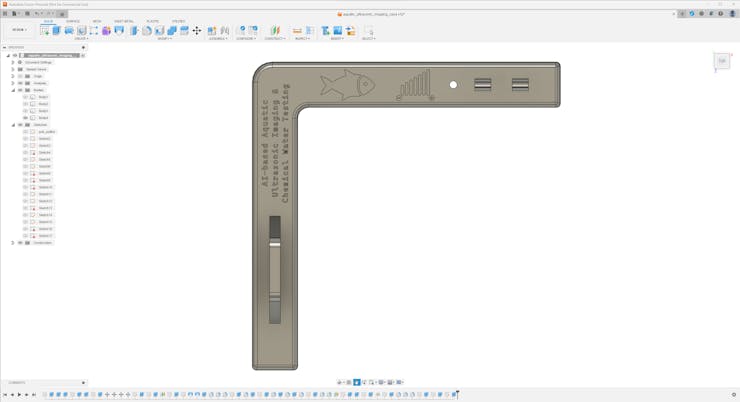
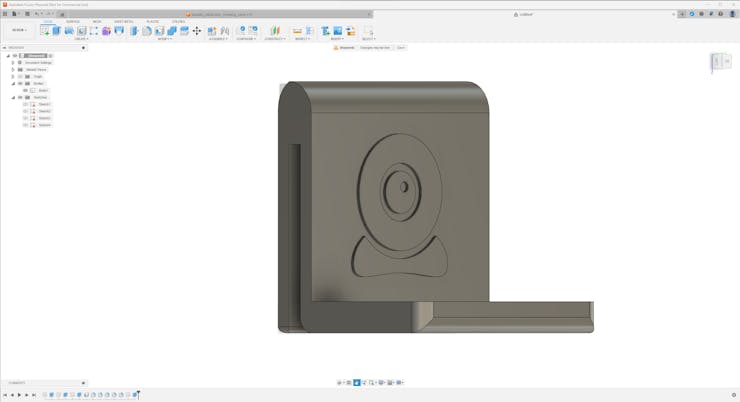
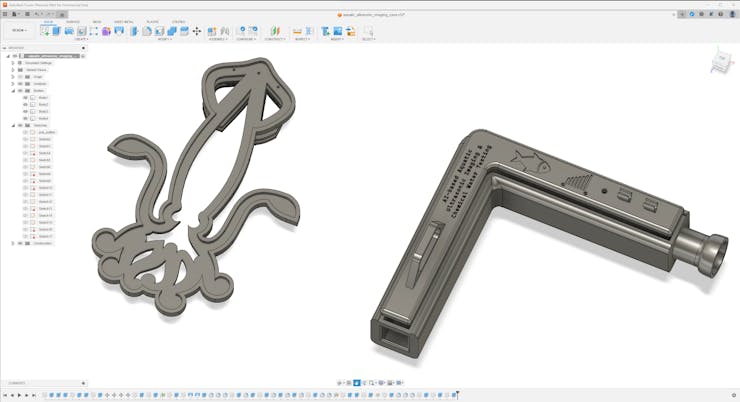
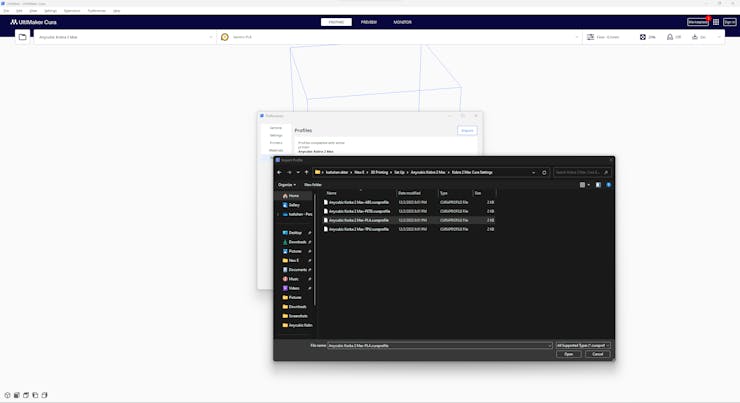
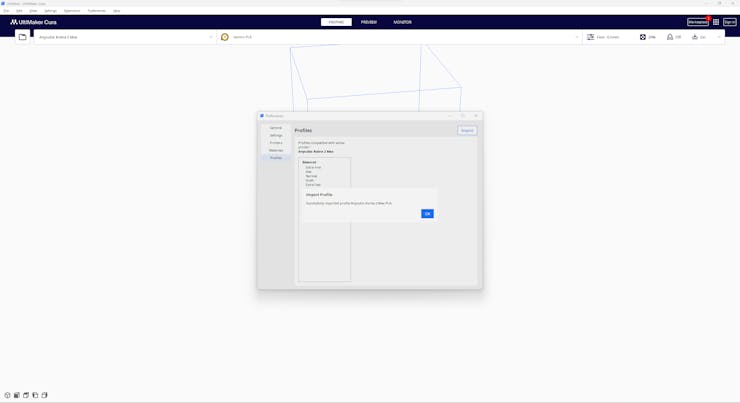
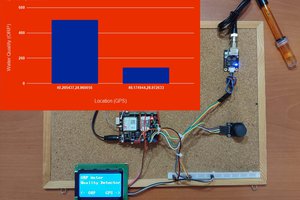
After perusing recent research papers on identifying air bubbles in the underwater substrate, I noticed that there are no practical applications focusing on detecting underwater air bubbles and assessing water pollution consecutively so as to diagnose potential toxic contaminants before instigating detrimental effects on the natural environment or a commercial fish farm. Therefore, I decided to develop a feature-rich AIoT device to identify underwater air bubbles via a neural network model by applying ultrasonic imaging as a nondestructive inspection method and to assess water pollution consecutively based on multiple chemical water quality tests via an object detection model. In addition to AI-powered functions, I also decided to build capable user interfaces and a push notification service via Telegram.
Before working on data collection procedures and model training, I thoroughly searched for a natural or artificial environment demonstrating the ebb and flow of underwater substrate toxicity due to overpopulation and decaying detritus. Nevertheless, I could not find a suitable option near my hometown because of endangered aquatic life, unrelenting habitat destruction, and disposal of chemical waste mostly caused by human-led activities. Thus, I decided to set up an artificial aquatic environment simulating noxious air bubbles in the underwater substrate and potential...
Read more »































Please feel free to leave a comment here if you have any questions or concerns regarding this project 🙂