Gareth
GarethAll schematics, CAD models, manufacturing drawings, source code, circuit schematics and PCB designs are linked.
The project's main objectives were:
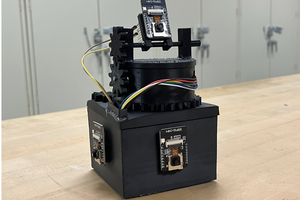
- Build camera turret capable of 2-axis rotation
- Rotation must be continuous
- Speed in either axis must be >6.7 RPM
- Requires position accuracy of < 1 degree
- Full data stream must be received from camera (31MBps Firewire)
These goals were achieved by:
- Making use of Moog slip rings to allow data and power connections
- allowed for continuous rotation
- powered camera and carried data (>31MBps)
- Carried power and clock signal for motor control
- Making use of two 200 step stepper motors in half-step mode
- results in 0.9 degree steps
- achieved drive in excess of 50RPM for both axes
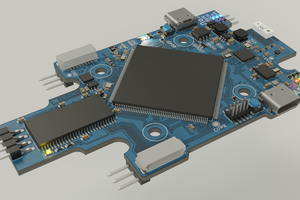
- Used an Arduino
- Communicated with GUI on computer
- Received position data from hall effect sensors
- Sent step motor commands to controllers
 Charlie Smith
Charlie Smith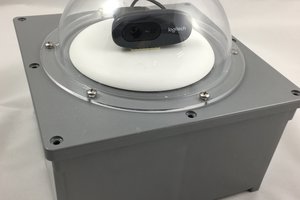
 John Leeman
John Leeman
 Artur Majtczak
Artur Majtczak