At this point of my design, I wasn't really following any plan nor was I thinking of the final resulat of my model where I would have to print it, while also taking into account every other details such as incorporating the electronics components or assembling the parts together. I just had a general idea of what the model would look like but obvioulsy, I knew my job wasn't just done already like that. But by doing that, it helped me visualize the lookalike of our project's result and also gave an approximation of the mass of the object that I was going to print out.
Now I had to think more in details while taking the constraints into account. The scale, the measures of the components, how should I assemble the differents parts of my robot, how should i attach the wheels to the legs. All that needed to be thought of.
I started off by revisiting through all of our components and their dimensions, and how they'd be placed in our robot. And one of the main issue was to think of a way to attach the wheels and the motors to the legs. I first thought of simply cutting a compartment in order to fit the motor with the wheels attached to it but the combination of these 2 objects created a shape that was just quite impossible to design so that it can fit through. I struggled for quite a while to find an idea to place the wheels and finally i came up with the idea of splitting one leg in 2 creating some sort of coffin that would the motor in place. A picture is worth a thousand words so here's what I imagined and how I designed it :
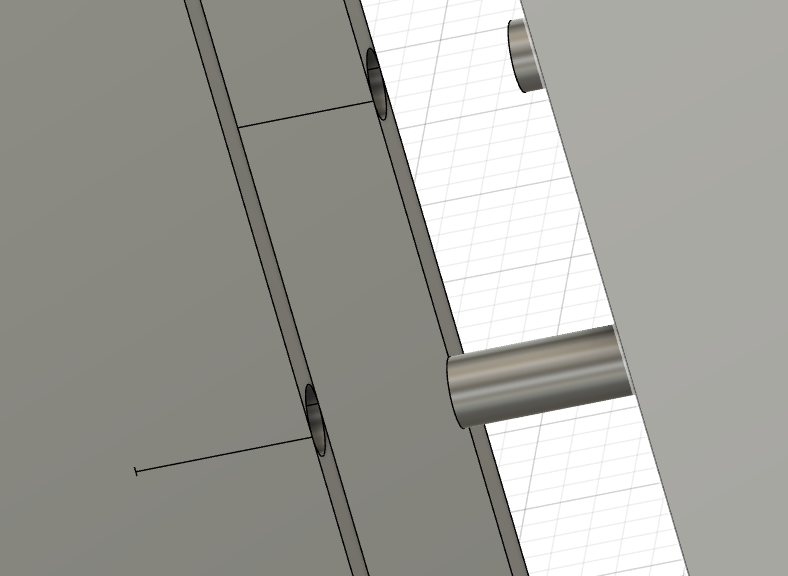
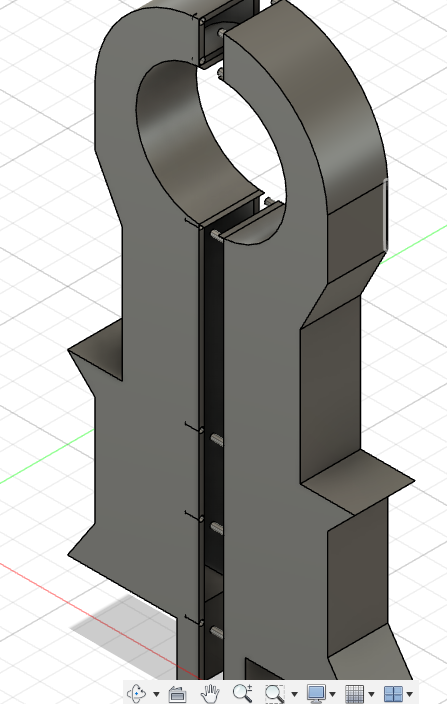
I also found a video that explained how I could split the body in 2 and then create an assembling method by "clipping 2 bodies" using a male-female assembling method.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.