As a group of 4 students, all with their own differences and specificities, one passion united us all: our admiration for the Star Wars franchise and our passion for space. What's the most iconic thing about Star Wars apart from the lightsabres? Droids of course, and who's the most iconic droid in the franchise, R2D2 of course. That's why we decided to build a miniature replica of this droid.
First of all, we searched online for existing robot-building projects and compared them with the droid's features, based on what we saw in the films. In doing so, we drew up a list of features that we thought could be added to our robot. On the other hand, we also had to remove other iconic features that were out of our reach, such as hologram projection or tazer mode.
The main features that we have retained and that we intend to add to our robots are as follows:
- an 8 x 8 monochrome MAX7219 LED matrix to assist and provide guidance to the user, just as R2D2 would do.
- bringing back to life the sound effects we hear in the films (mainly the sound of R2D2), to make our robot more interactive with the user
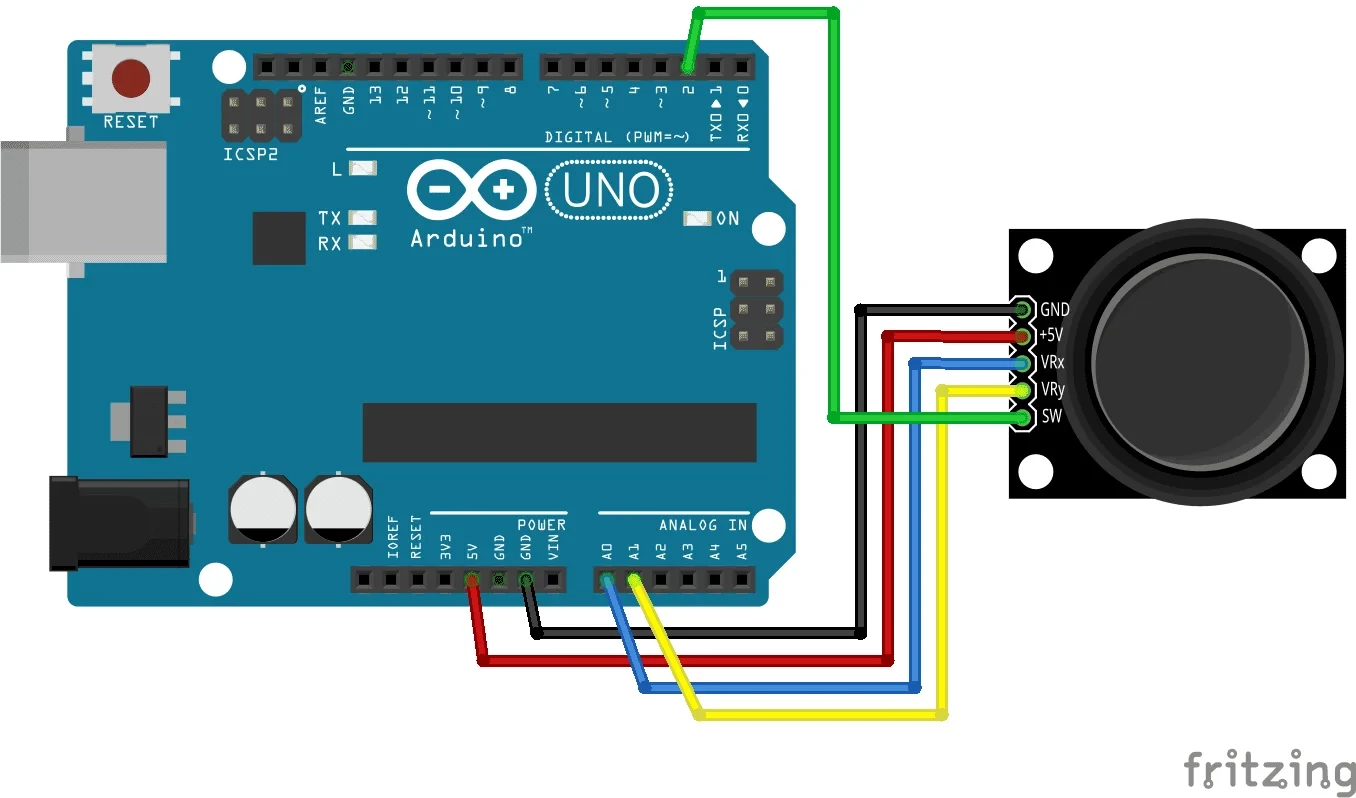
- propose two modes for controlling our robot: a mode controlled manually by a controller and another mode where it would move and follow the user automatically.