To control our robot when it's in “manual” mode, we had to design a joystick to manage its movements. We started by connecting the joystick, following the instructions and wiring diagram below:
https://arduinogetstarted.com/tutorials/arduino-joystick?utm_content=cmp-true
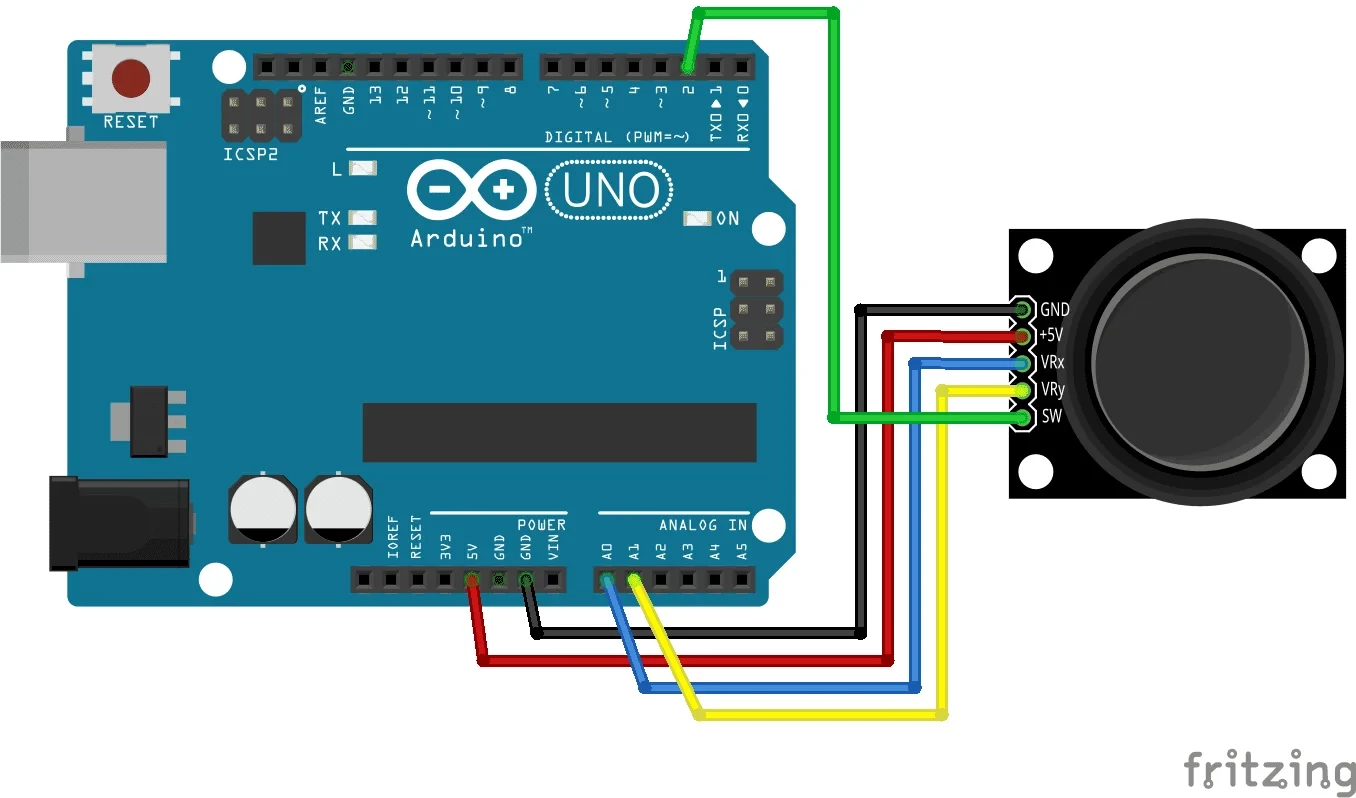
We just didn't connect the SW pin (used to read the status of the joystick's built-in button), as we don't yet see any use for it in our project.
Next, we studied the different ways of communicating between several arduino boards in order to send the joystick coordinates to the board located in the robot. We opted for radio transmission and reception, which we felt was the most appropriate solution for our project.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.