 Jared Fenster
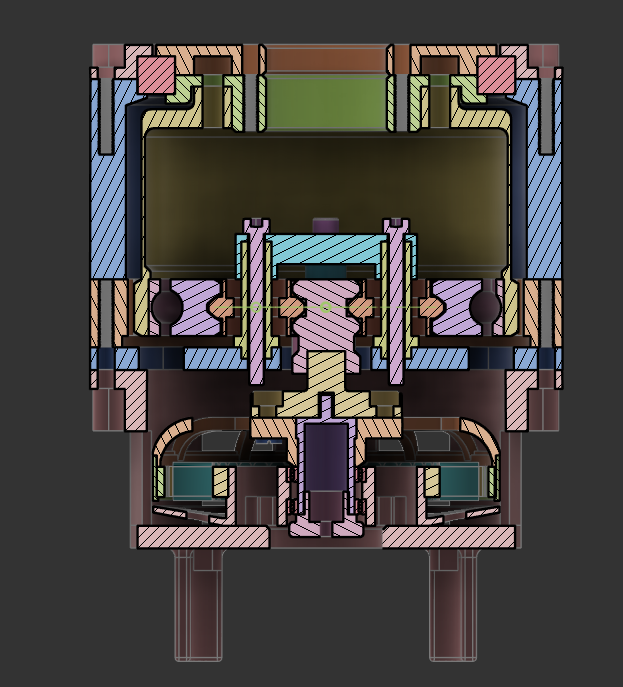
Jared FensterThe empty space within the FlexSpline is where the magnetic encoder will be placed for final joint angles. This design is still a little larger than I hope the final design is. I may look into optimizing some of the space where the motor connects to the planetary gear, possible make I direct connection to the input of the gear rather than the yellow piece that is currently between the two.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.