 Vedran
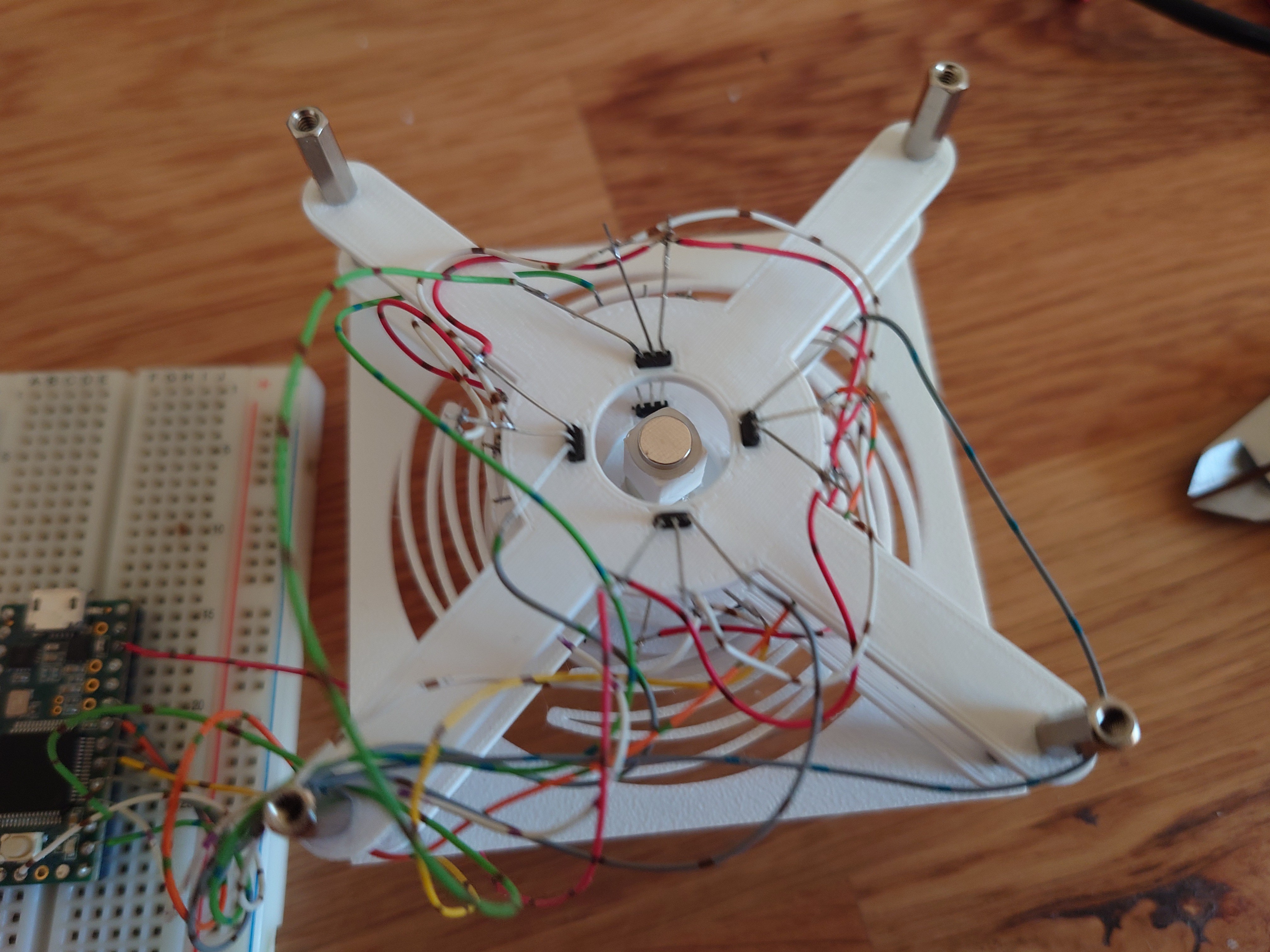
VedranI am fairly certain I'd like to tackle this with some magnets, and as many OH49E hall effect sensors as necessary. I've chosen to use 3D printed flexture to hold the mouse itself, suspend a magnet on it, and track it with hall effect sensors. Teensy 3 acting as an HID device then reads the sensors and commands the mouse movement.

First arrangement contained one long magnet placed in the middle of 8 hall effect sensors, split in 2 rows.


Idea was that by tilting the magnet 45 deg between the sensors, it would be easier to track rotation. And while that turned out to be true, the rest of the tracking wasn't really something that made a lot of sense.
For a second attempt, I tried to reuse this contraption with a different magnet configuration. Instead of one long, oddly polarized magnet, use two round magnets with poles on their flat sides. Magnets are spaced out so that they are slightly higher than the two sensor plates.

And that approach indeed produced relatively nice output:

Problem, however, was that tracking rotation around Z axis became impossible due to it causing no change in poles facing the sensors. The graph below shows twisting of the knob back and forth, for the whole duration of the graph. The readings here are simply the readings of how much the knob was accidentally pressed or pulled during the motion.

Subtracting average of the data produced nothing interesting. Some of the higher spikes are also a bit misleading, but they are a product of the thin magnet being pushed passed a sensor, causing S pole, then N pole to move past the sensor and changing the value from positive to negative (and vice versa).
So if this to be a truly 6DOF mouse, a different approach is needed.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.