0%
0%
One more 3D mouse
I also want to make a 6DOF mouse
 Vedran
VedranBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

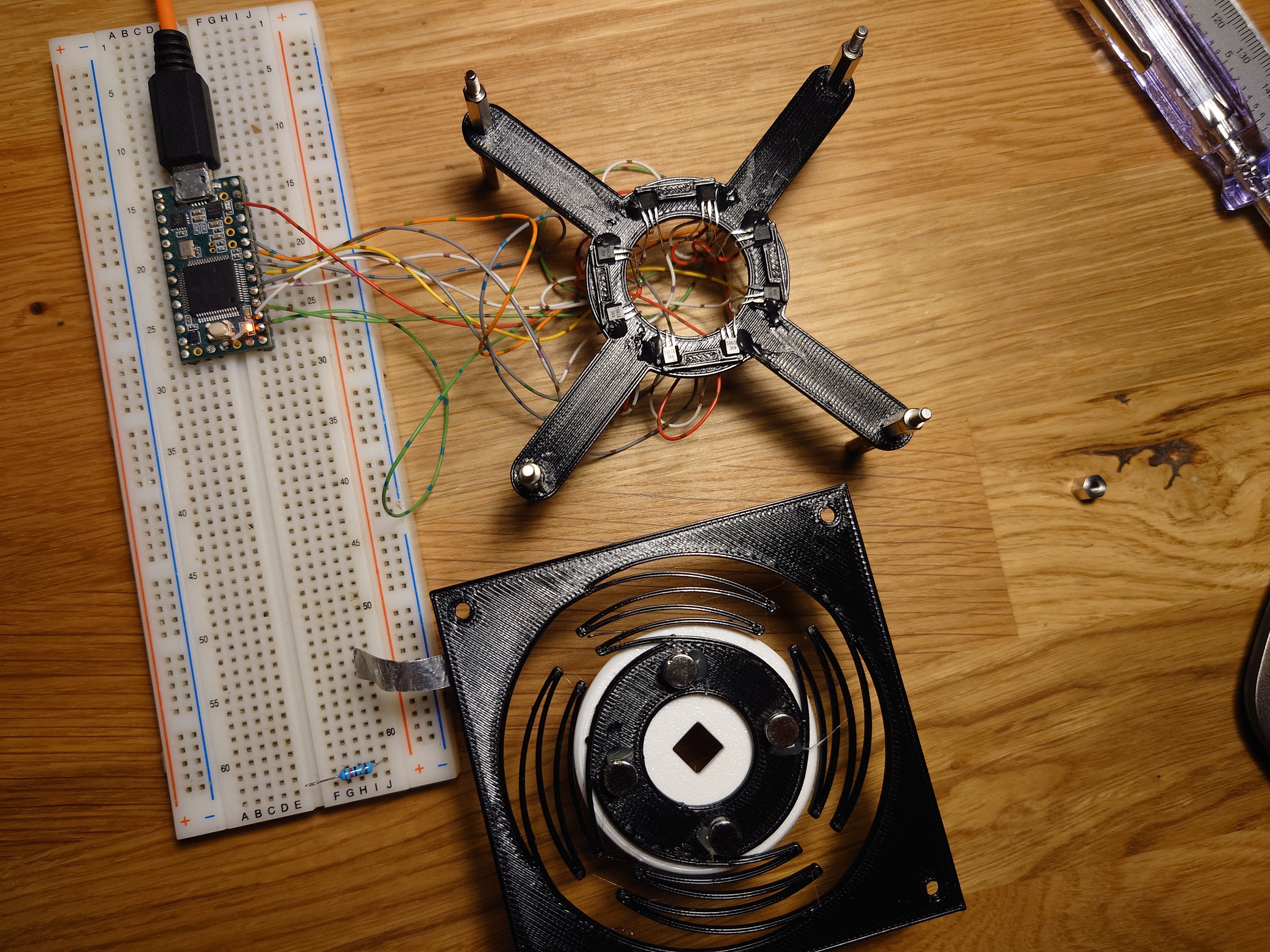




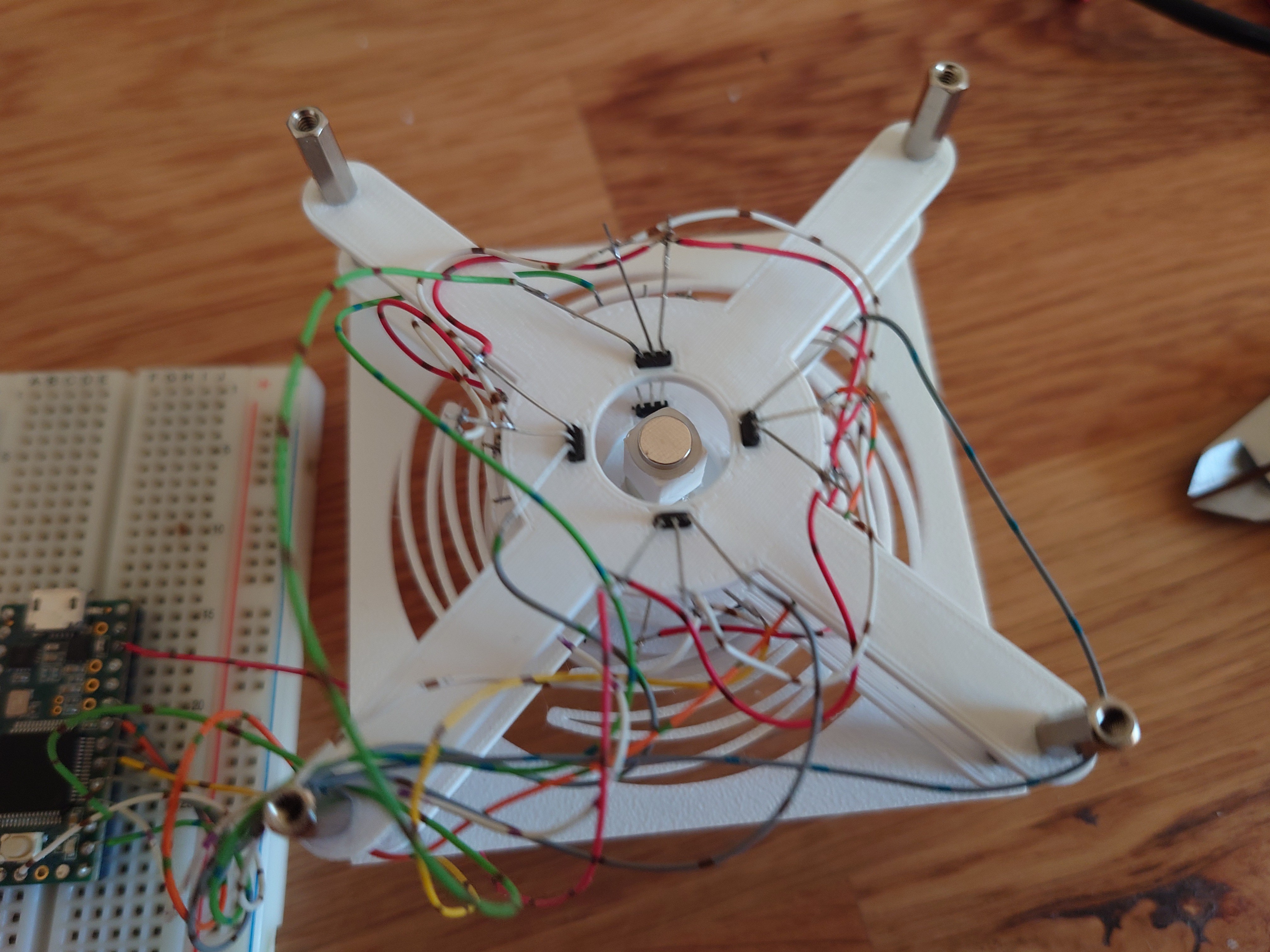




I saw your project using analog Hall sensors for 3D mouse position. Great work! You might consider these magnetic IC solutions for better accuracy and simpler design:
1. **Allegro A31301**: SPI/I2C, low power, 3D magnetic field sensing.
2. **TI TMAG5273**: I2C, low-power, 3D Hall-effect sensor.
3. **Melexis MLX90393**: SPI/I2C, flexible 3D magnetic field sensor.
4. **Infineon TLE493D-W2B6**: I2C, low power, 3D sensing with 12-bit resolution.
These could enhance your project with integrated solutions and digital interfaces. Hope this helps!