 HighTorqueRobotics
HighTorqueRoboticsWe have designed a head for the Mini π robot that can tilt up and down, move forward and backward, rotate left and right , and turn left and right. We would appreciate your feedback on this head design. A D435i depth camera will be installed within it. Are the small lights on either side of the depth camera necessary?
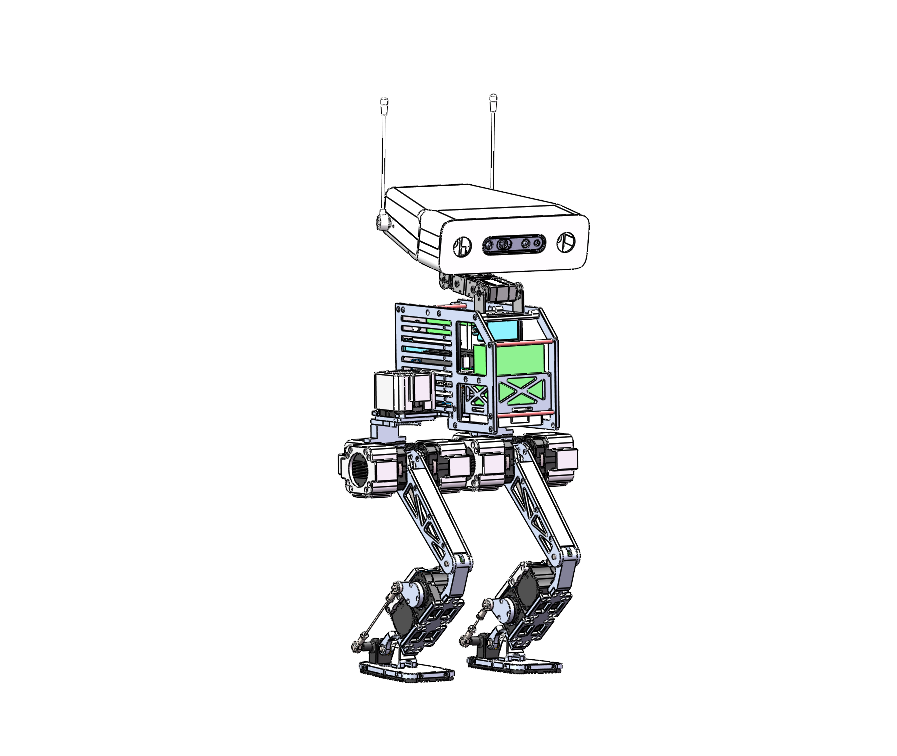
Here are some examples of the movement capabilities.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.