 HighTorqueRobotics
HighTorqueRoboticsThe development process of the project:
Requirement:
- Compact and Light : It needs to be very small and weigh less than 10 kg for easy debugging, transport, and testing.
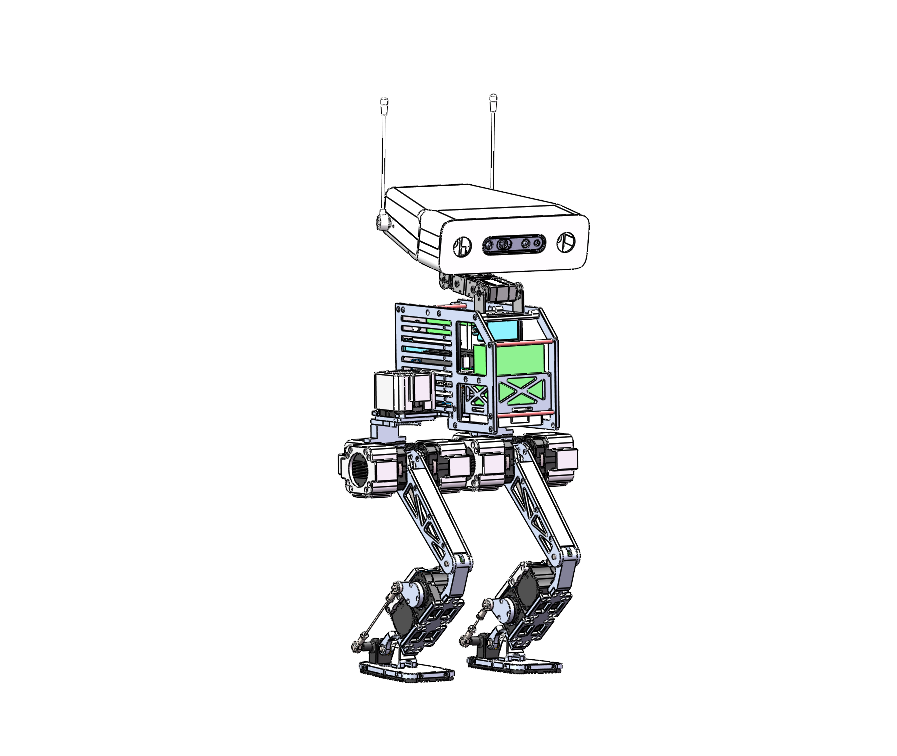
- Flexible Locomotion Movement : Its legs must have at least 12 degrees of freedom (DOF) with 20 DOF in total, matching human structure and movement to meet most bipedal motion needs.
- High Performance : It must run, jump, and even do flips. It should also have good load capacity, like adding a 1-2 kg robotic arm and carrying over 1 kg.
- Optimized Joints : The joint modules should be within 125 cm³ in volume, weigh less than 300 g, and have a peak torque of over 10 Nm.

We started this project three years ago but couldn't find motors that met our needs, so we designed our own joint modules. After two years of continuous optimization, we created a joint module with a diameter and thickness of less than 50 mm and a peak torque of over 10 Nm.
To achieve precise control, we optimized the reducer's precision and the motor's cogging torque, achieving excellent precision and backdrivability. With 12 DOF in the legs, it's hard to find a static zero position when powered off. We used absolute dual encoders inside the module to record the absolute zero position, so the robot doesn't need to recalibrate after reconnecting.
We wanted to control a 6 DOF leg with one bus (EtherCAT is too large), so we chose CAN FD for higher bandwidth and response frequency and developed a USB-to-CAN FD development board. It can control 10 motors on one bus at 1000 Hz, and a single controller board supports 4 CAN buses, controlling 40 motors at 1000 Hz.
Finally, we made Mini π compact, weighing 7 kg, and able to carry an additional 5 kg load. Its top speed is 1.5 m/s, and it can jump up to 2 cm, theoretically able to do flips.

Mini π has been tested in real environments, running continuously for hours without the motors overheating.
To make it easy for developers to use, we implemented three control algorithms based on reinforcement learning, MPC, and ZMP, all open-sourced with video tutorials.
These algorithms are available on GitHub:
https://github.com/HighTorque-Robotics/livelybot_rl_control
https://github.com/HighTorque-Robotics/livelybot_dynamic_control
Mini π main activities:
2024 IEEE International Conference on Robotics and Automation (ICRA2024) WORKSHOP in PACIFICO Yokohama, May 13th to 17th, 2024, Japan
Mini π is also equipped with ROS SLAM and navigation functions.









 Gaultier Lecaillon
Gaultier Lecaillon
 Keith Elliott
Keith Elliott
 BTom
BTom
So cute and cool!