 Dominik Kuhn
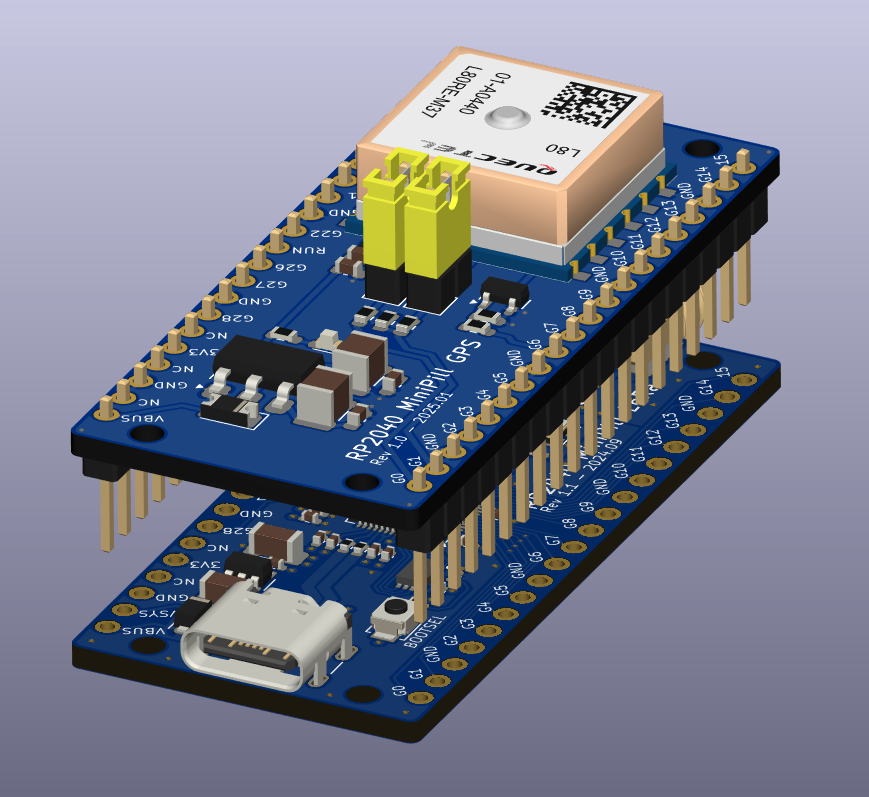
Dominik KuhnIn the first step our board has become a little wider than the standard Raspberry Pi Pico, but it still remains in the standard grid, so that it fits easily on a breadboard. This means it is possible to develop both simple prototypes as well as add new extension boards. The board is also pin-compatible with the normal Raspberry Pi Pico.
This board can be programmed just like any other Raspberry Pi Pico, but to introduce young and interested people to the topic of LoRa, we decided to run MicroPython on the board by default. This allows us to provide a hardware as well as a software basis for workshops with students in STEM disciplines, for example. The first prototypes are now in the pipeline so we can test our software with them directly. In the future, we would like to design extension boards for our PCB with e.g. GPS, acceleration sensors, solar and battery and integrate them into our community projects.

 Jarrod
Jarrod
 surfingsteve
surfingsteve