Ehsan Abdi
Ehsan AbdiAn underwater glider works on a similar principle as normal air glider where the medium is water. There is no propeller in either glider, but the main difference is that unlike air gliders, underwater gliders use a neat trick to climb back the water column after gliding down. They do this by changing their density. Gliders are carefully designed to have a density very close to that of water. Then by simply changing their volume (which can be achieved using a simple piston pump or an inflating oil bladder), they can change their density and use the buoyancy force to fly up and down the water column.
By moving a large weight internally (usually the battery pack) it can control its pitch and by rotating the weight, it can roll and therefore fly towards a certain heading.

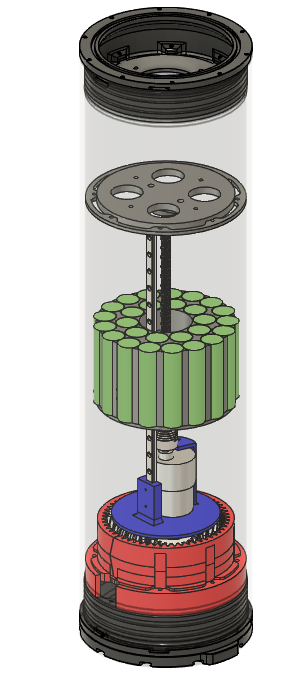
The glider will consist of three separate sections. These are buoyancy drive, mass shifter and electronics sections. Each section will be housed inside a 5" BlueRobotics pressure housing. This way, later we can upgrade the buoancy drive section to reach the full 1000m depth.
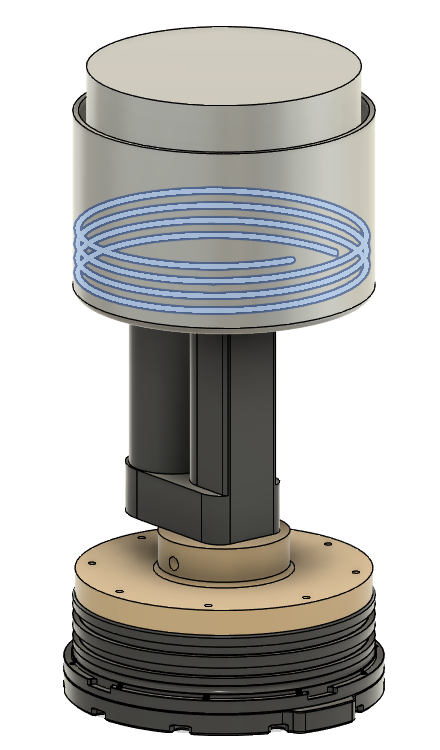
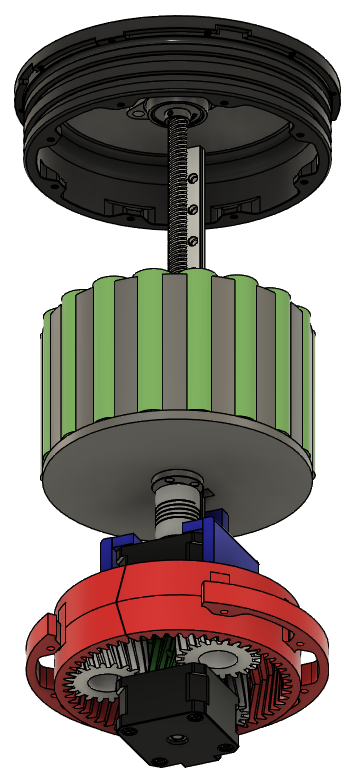
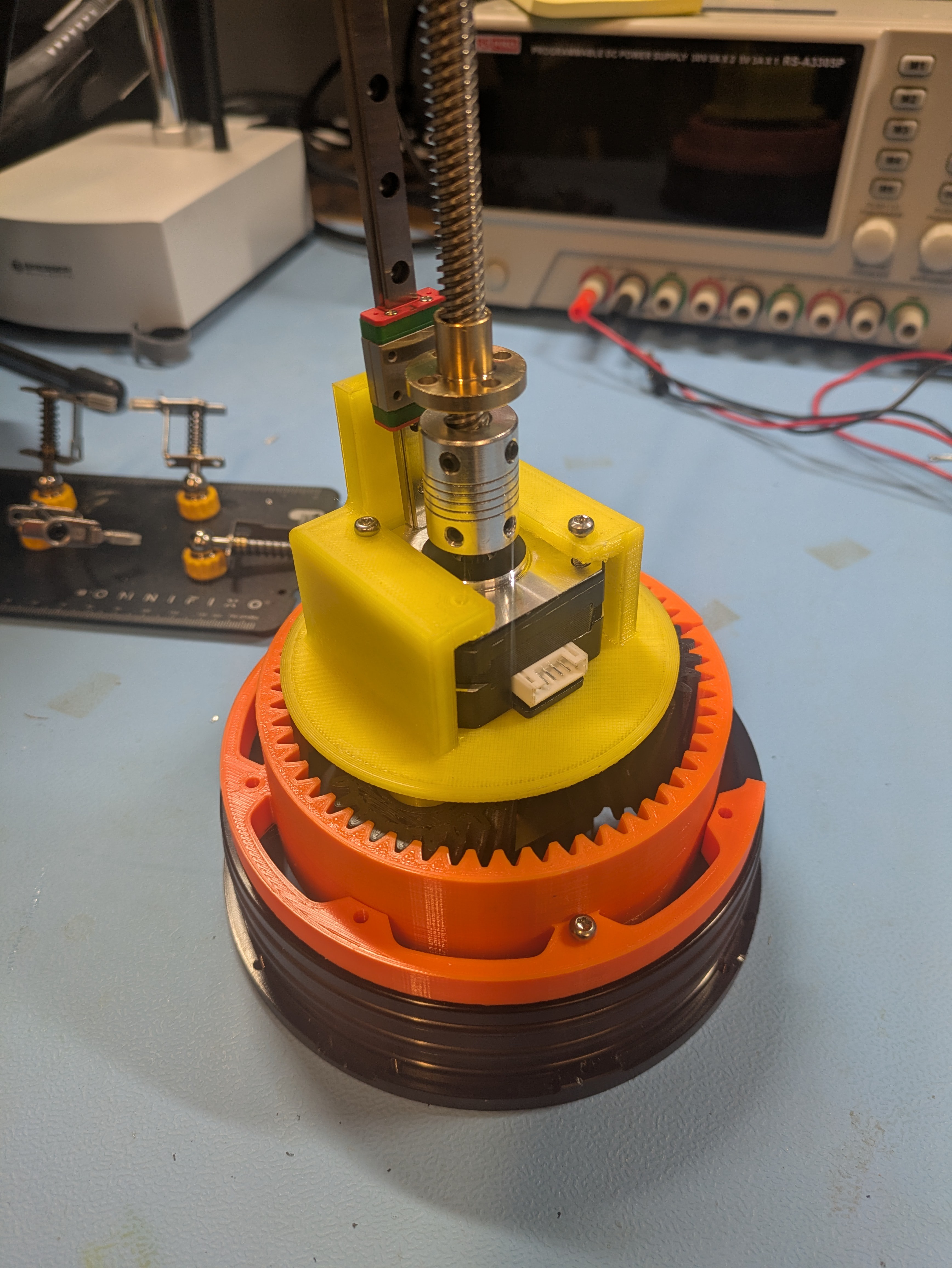
Initially I will focus on making a simple but robust buoyancy drive system. This will inistially consist of a custom-made rolling diaphragm and a linear actoator. Next step is to focus on the mass shifter system. As for comms, I am planning to use GSM and LoRa at the beginning and add Iridium at a later stage. The aim of this first build is to quickly and cheaply put together something functional and see what major changes needs to be done for the next version.