 Pavel Surynek
Pavel SurynekI am proud to share that my paper on the development of the RR1 robotic arm and its use in robotics education projects at my university has been published at the IEEE CASE 2024 conference in Bari, Italy.
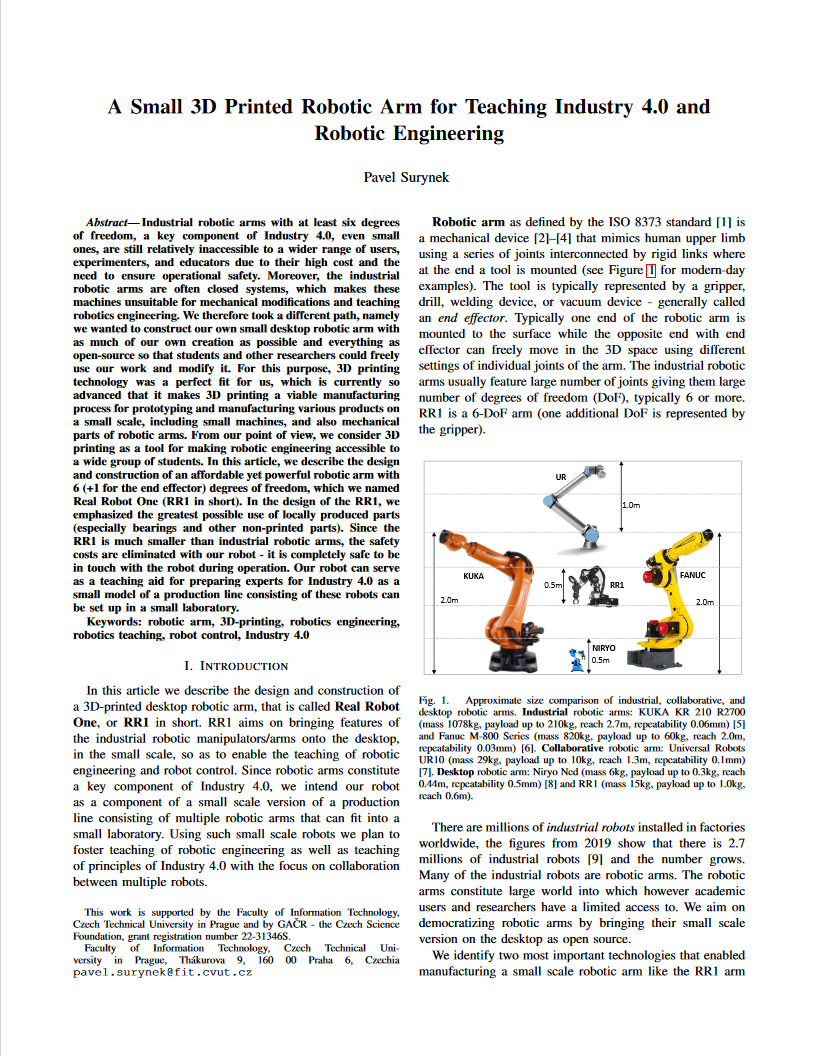
The paper briefly addresses the construction of the robot using 3D printing and the role of the robot in teaching of motion planning and multi-robot motion planning. Major focus of the paper is on building a concepts of Industry 4.0 consisting of small desktop robotic arms and other robots. Using small robotic arms enables to integrate everything in a small laboratory without additional safety measures that would be needed for large industrial robots. Integration of the RR1 robot in student projects is discussed as well.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.