Need Statement | Project Background | Significance
The need statement for our project is a way for Matt’s UROV to obtain a variety of sediment samples with different textures/properties without multiple dives.
Studying sediment samples from below sea ice will allow scientists to better understand the natural phenomena in the area. Sediment samples can also provide valuable information on the history of an area. Our project will conserve time by using a single dive to collect multiple samples/sample types.
Critical Requirements and Specifications
Requirements
- Attachment is modular
- Arm does not exceed the size of entrance hole
- Collected samples from different areas must be stored separate from each other
- Collect multiple samples (>1)
Specifications
- Fit through a 400 mm entrance hole
- Ensure collection device is positioned such that it is in the camera’s frame
- Collect sediment while UROV is at least 400 mm above seabed during sample collection
- Collect and transport multiple sediment samples per dive
- Use at most 4 control signals
- Maintain slight positive buoyancy of UROV
- Attach or detach within 30 minutes
- Each sample size is >=250 cc
Design Description
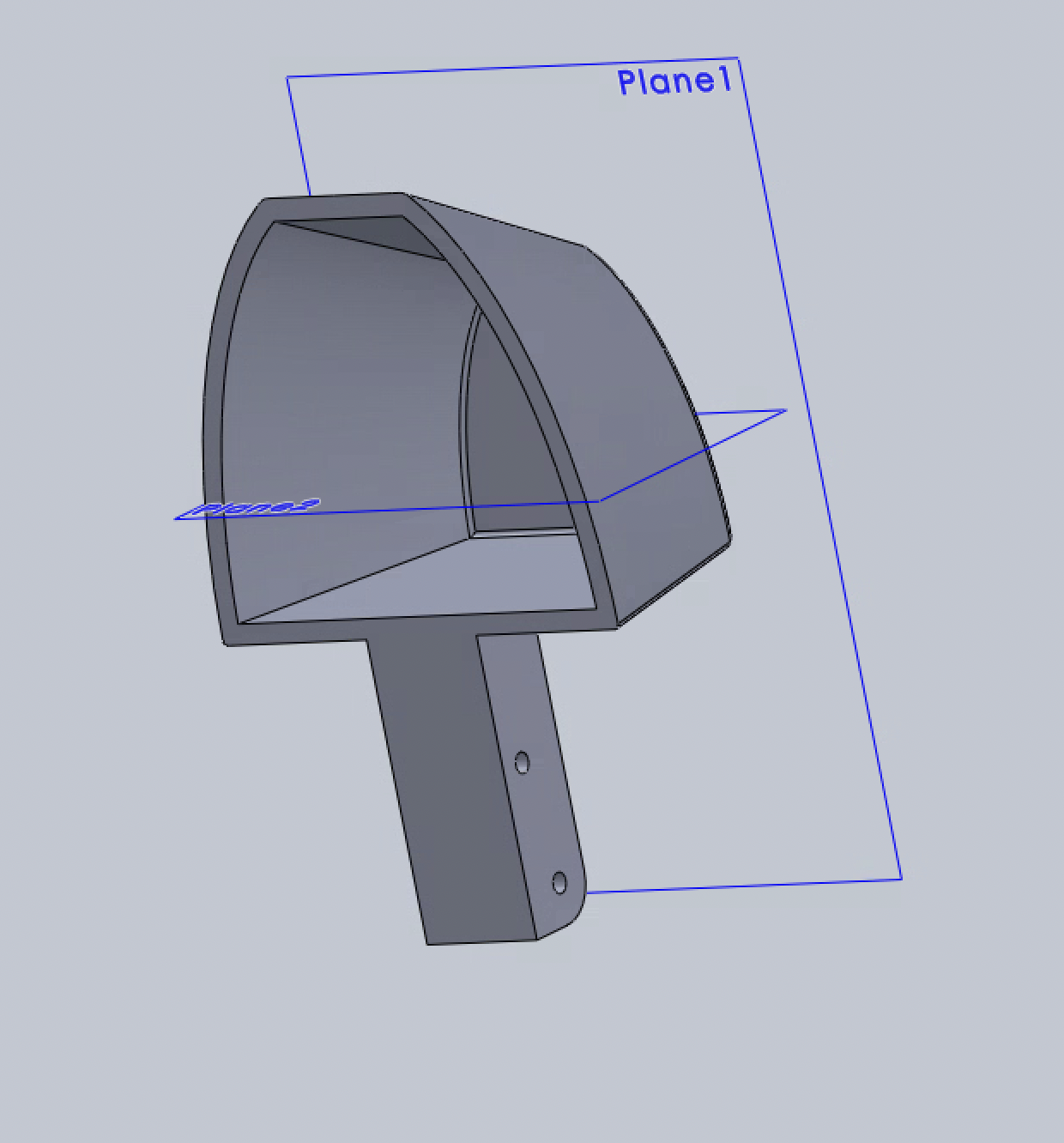
Double-Sided Scooper
- The double-sided scooper utilizes two scoops attached to the existing grips to clamp onto a middle divider, allowing the arm to grab two samples. The two scoopers will move independently of each other and be attached to the existing BlueRobotics arm for easy disassembling/reattachment. A rubber gasket may be required on the edges of the center divider plate to secure sediment inside when the scooper closes. Out of all the designs we had brainstormed in our first sprint, this design showed to be the most promising.
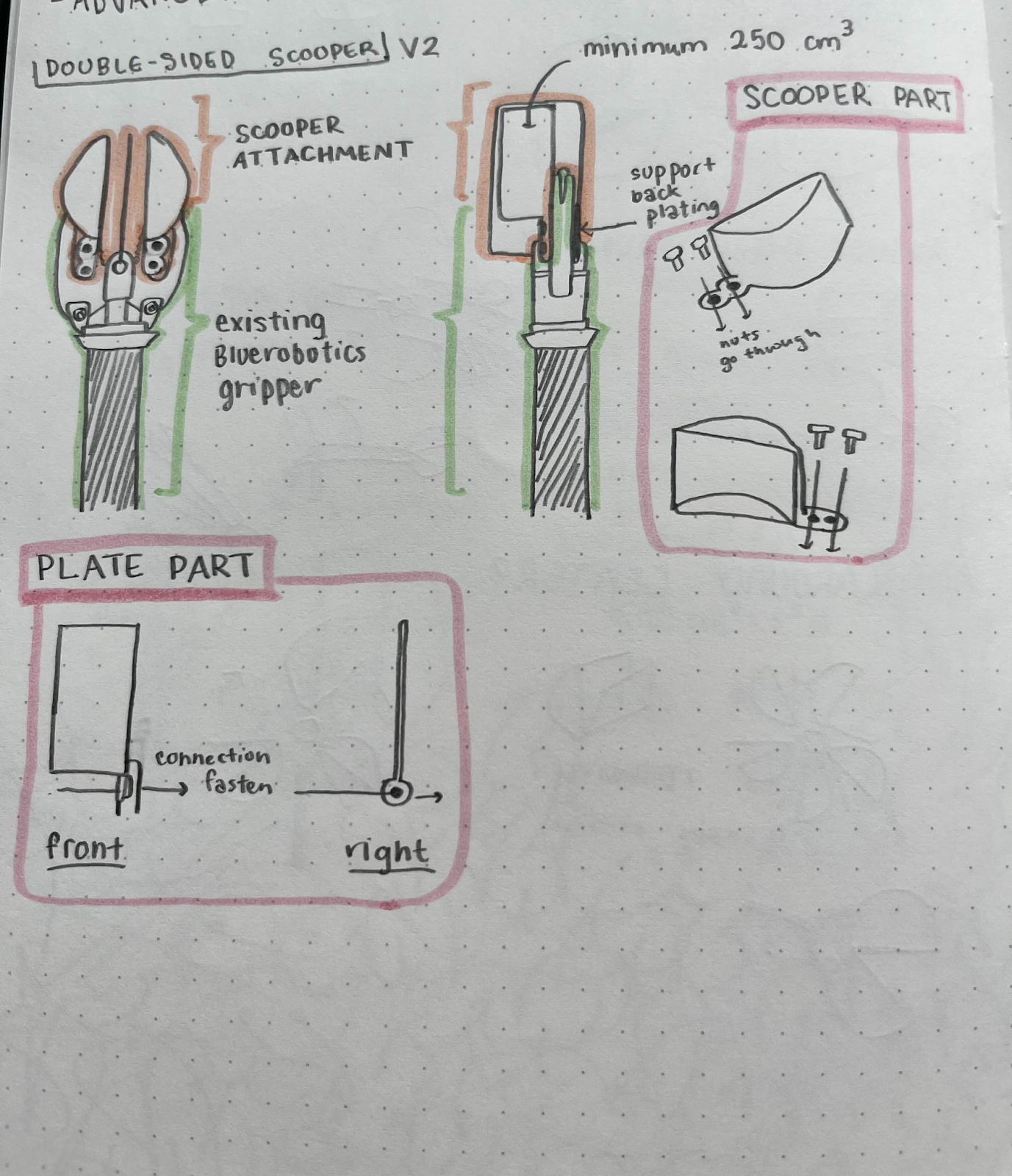
Features
Pros
- Simple design that will collect multiple samples.
- Grabs more than one sample
- Straightforward range of motion
- Does not require advanced mechanic application to existing solution
- Is able to grab within 5 cm from the top layer
Cons
- Only grabs two samples per dive
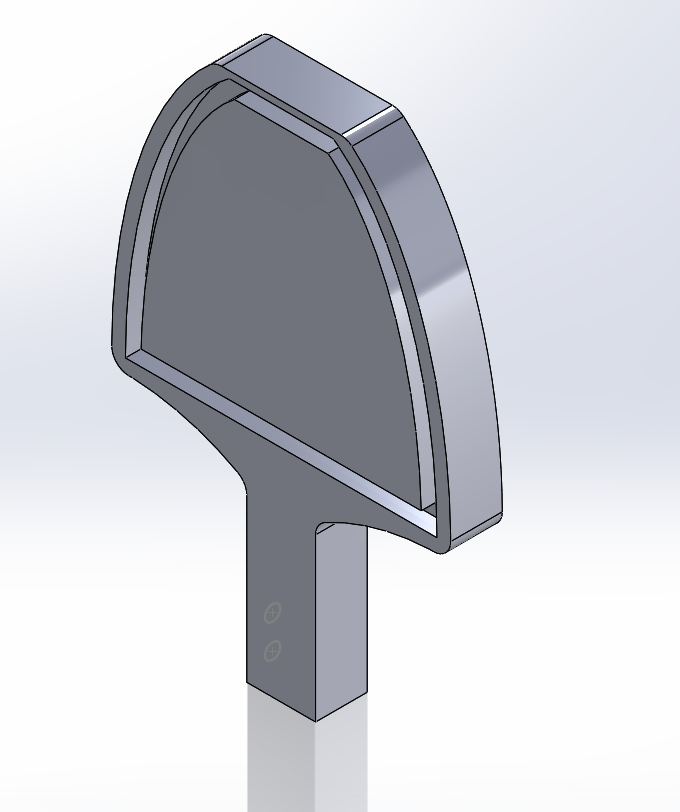
Scoop and Center Divider Plate Testing

With just the double sided scoop and divider plate, we simulated the water and sediment environment in a tub. The objective was to see the efficiency of the printed parts in retaining sediment with simulated motions.
Testing Takeaways
- Scoop part fits into divider part easily when lined up as the UROV would
- Sediment was secure when scooped into the center divider plate (no suction mechanism needed!)
Implementation
The BlueRobotics arm uses a linear actuation mechanism for the existing gripper, which causes each side of the grippers to move simultaneously rather than independently. To resolve this issue, we designed a few mechanisms to decouple the linear actuation mechanism. We designed mechanisms involving hinges/magnets, a pin and slot, which mimics the current gripper design on the arm, as well as a rack and pinion mechanism. These mechanisms would allow for the linear actuator to move the arms independently.


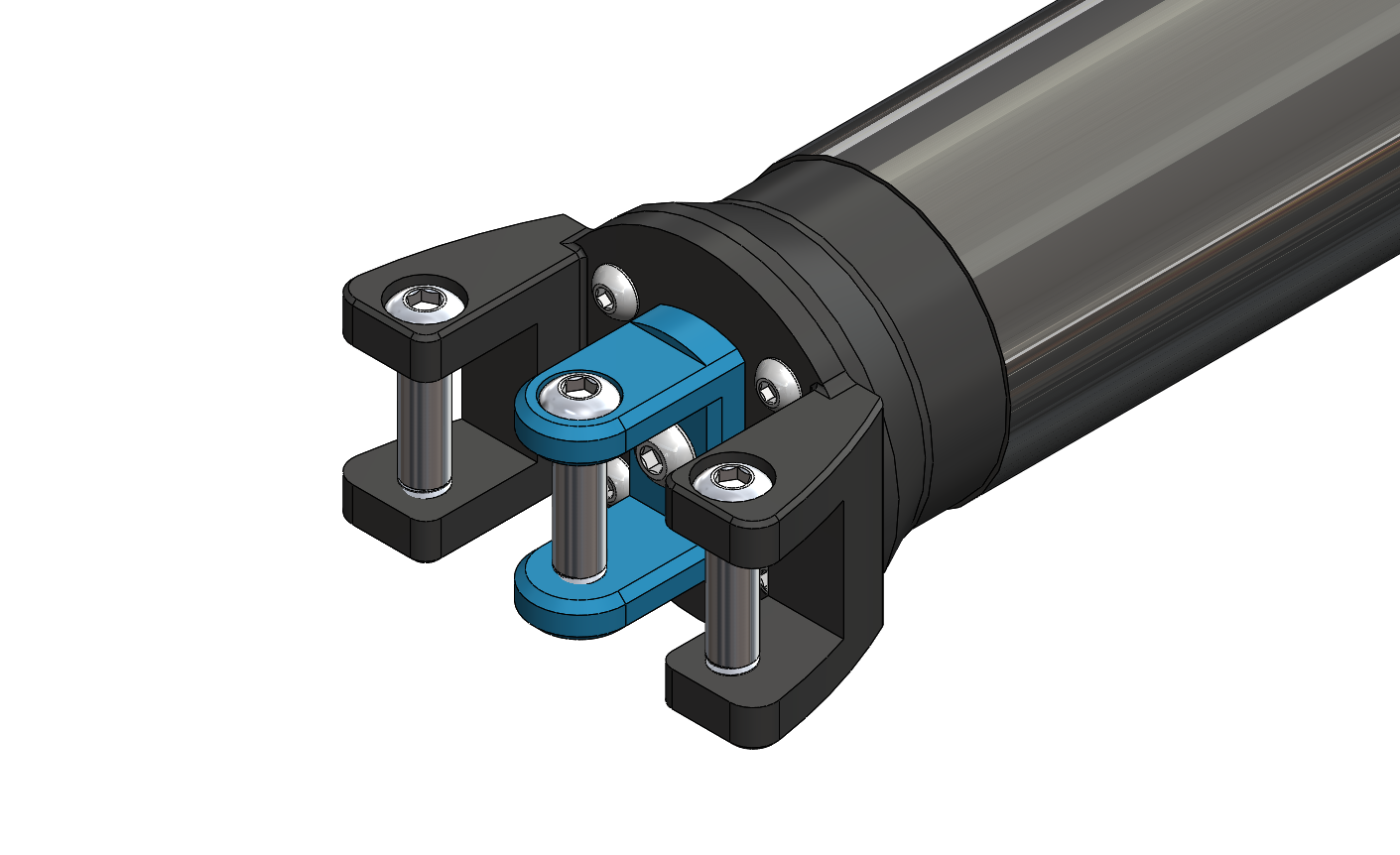
(Existing arm and gripper mechanism)
Hinge/Magnet
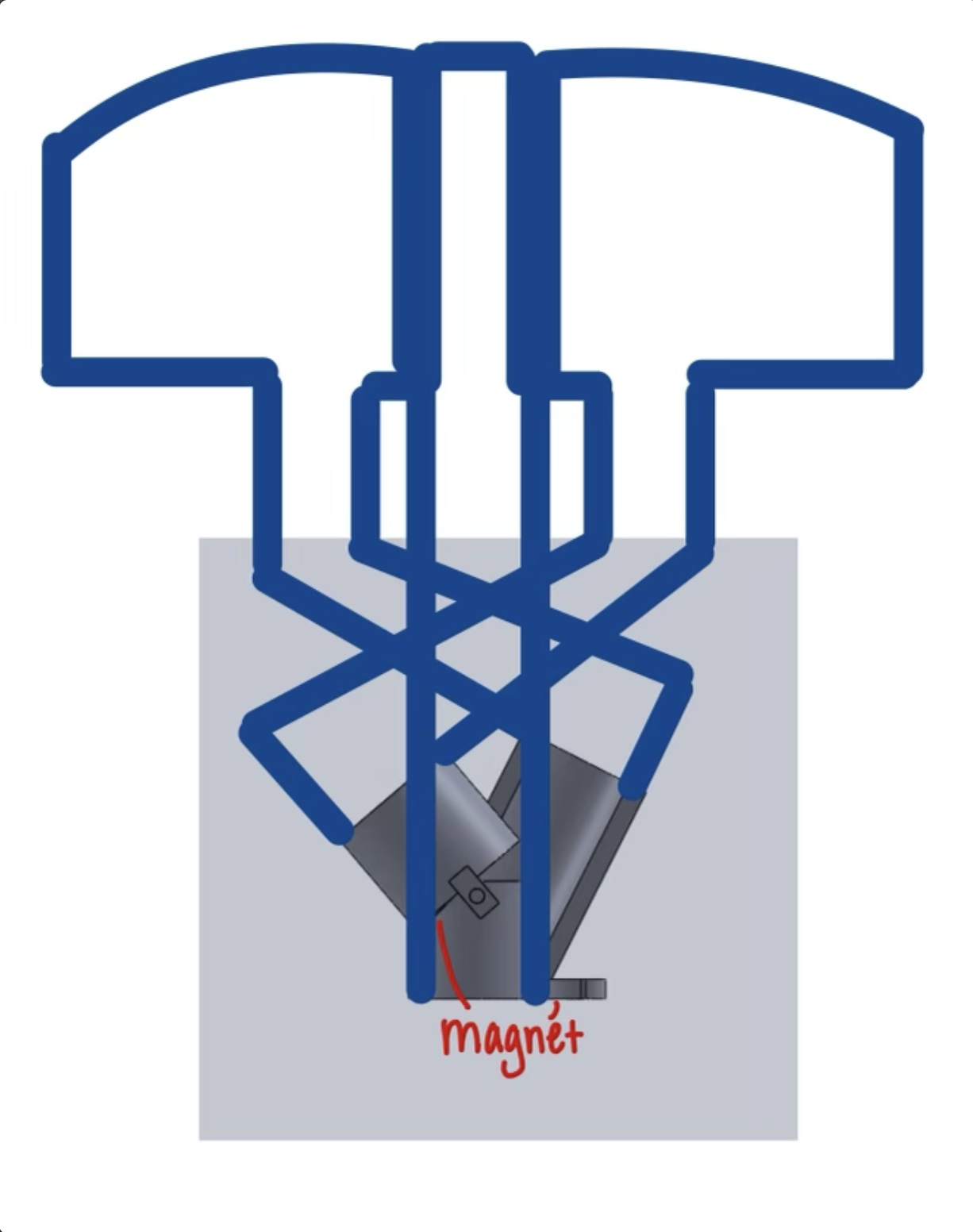
The hinge and magnet mechanism would fit on top of the linear actuation stroke rod, but unfortunately the rod is only 22mm when fully extended, as well as being small in diameter. After prototyping the design, we discovered that the PLA we had used for prototyping proved to be too weak due to the accuracy needed in printing to make small enough hinges for rotation. Additionally, using magnets and springs in freezing water conditions creates a wide room for error due to stresses placed on these small components.
Hinge/Magnet Prototyping
After 3D-printing the hinge/magnet design to be complementary to the provided BlueRobotics arm design, we were able to compare how many features were feasible with our given resources.
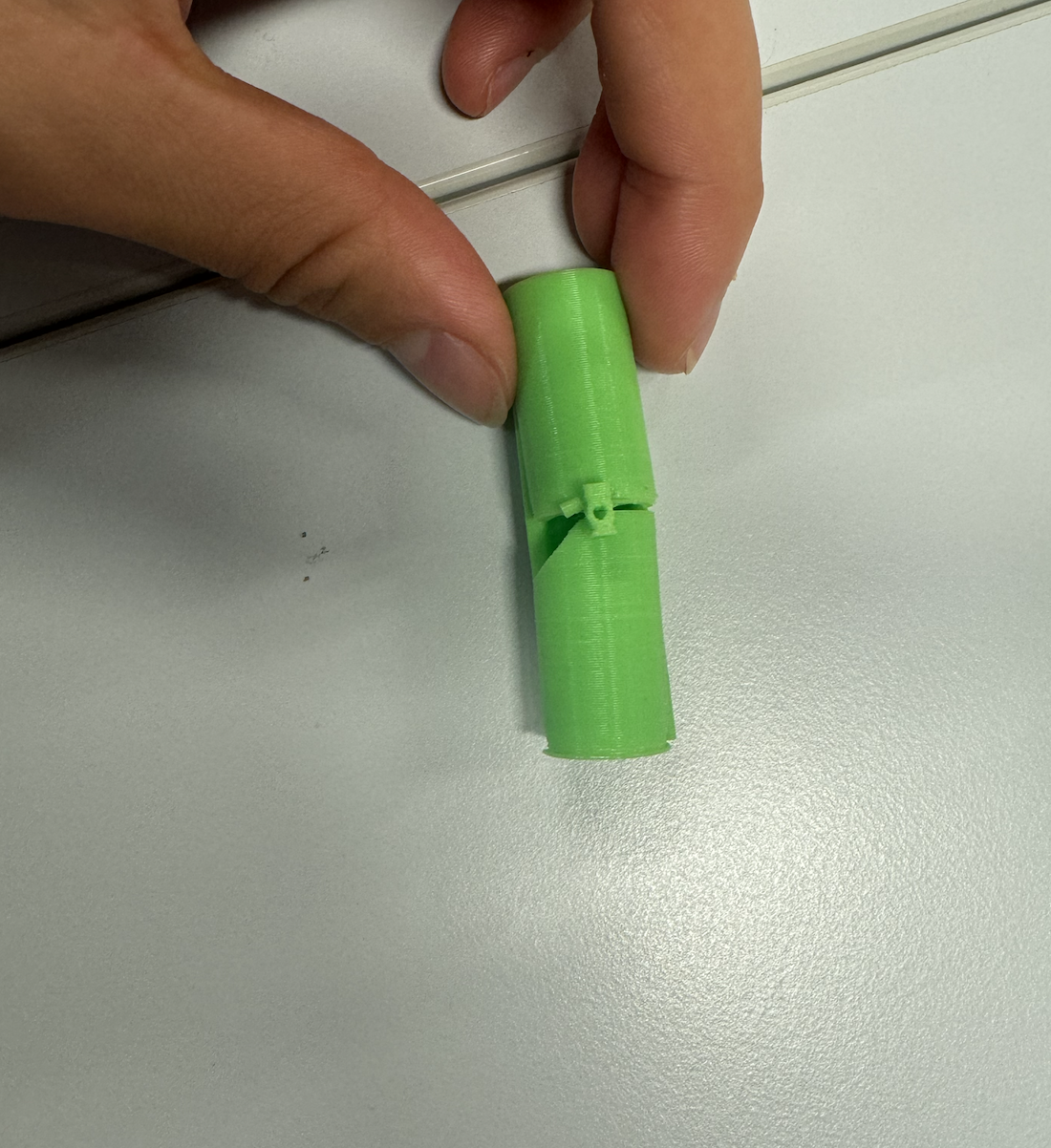
Prototyping Takeaways
- Retraction mechanism piece was too small for 3D printer
- Redesign with thicker walls and larger holes for pins
- Supports on printer cause error (excess material) in walls on one side of divider part
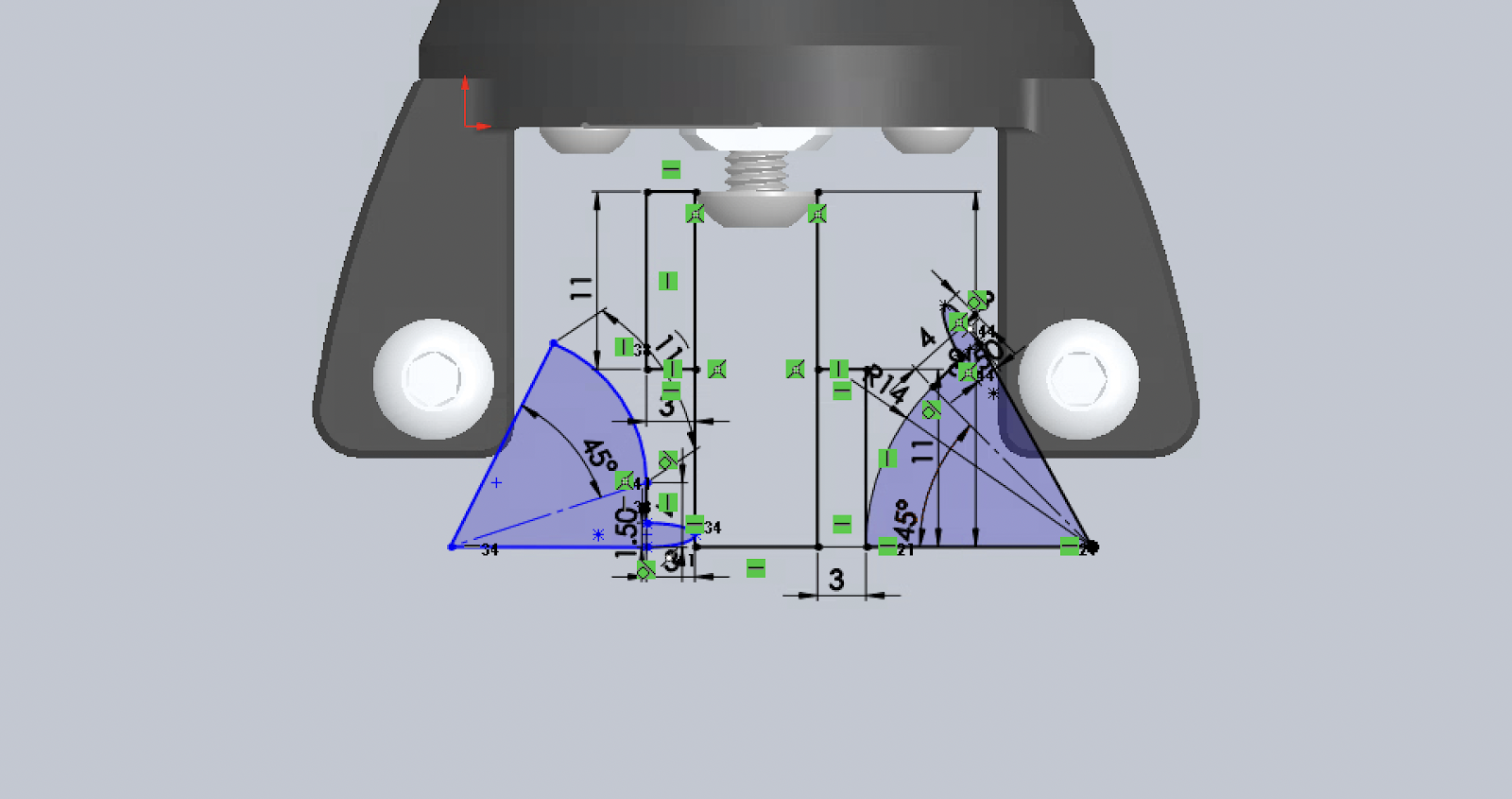
Pin/Slot
The double shear pin and slot mechanism decouples linear motion by altering the path geometry of the slots. This mechanism allows us to control one scooper with half the range of motion of the linear actuator, and the other scooper with the remainder of the ROM. The limited range of motion and available space in the existing mechanism provided significant design challenges for achieving a sufficient opening angle (30-45 degrees) with the altered slots. The developed geometry and prototypes have been validated and serve as a proof of concept for the idea. Additional work is necessary to develop appropriate slot geometry and design compatible scoop and divider parts to fit the mechanism.
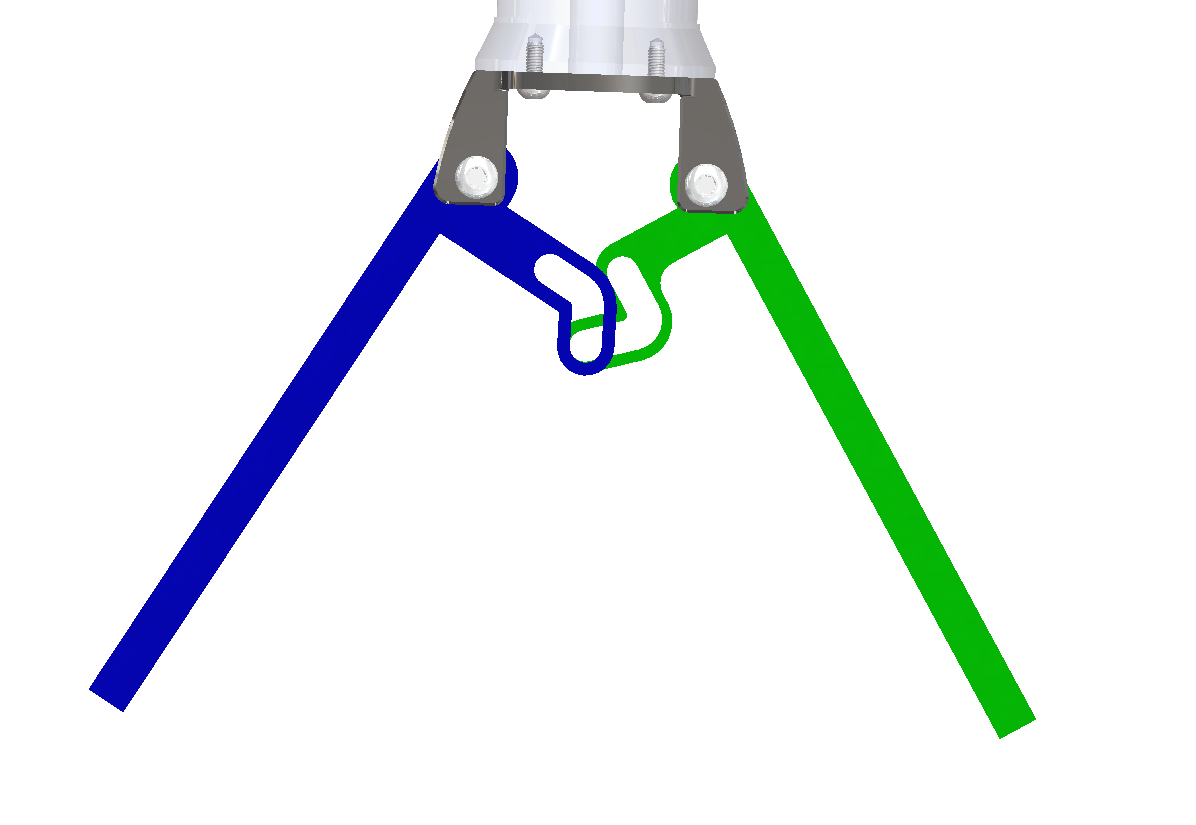
(Top view) (Isometric of fully open position)
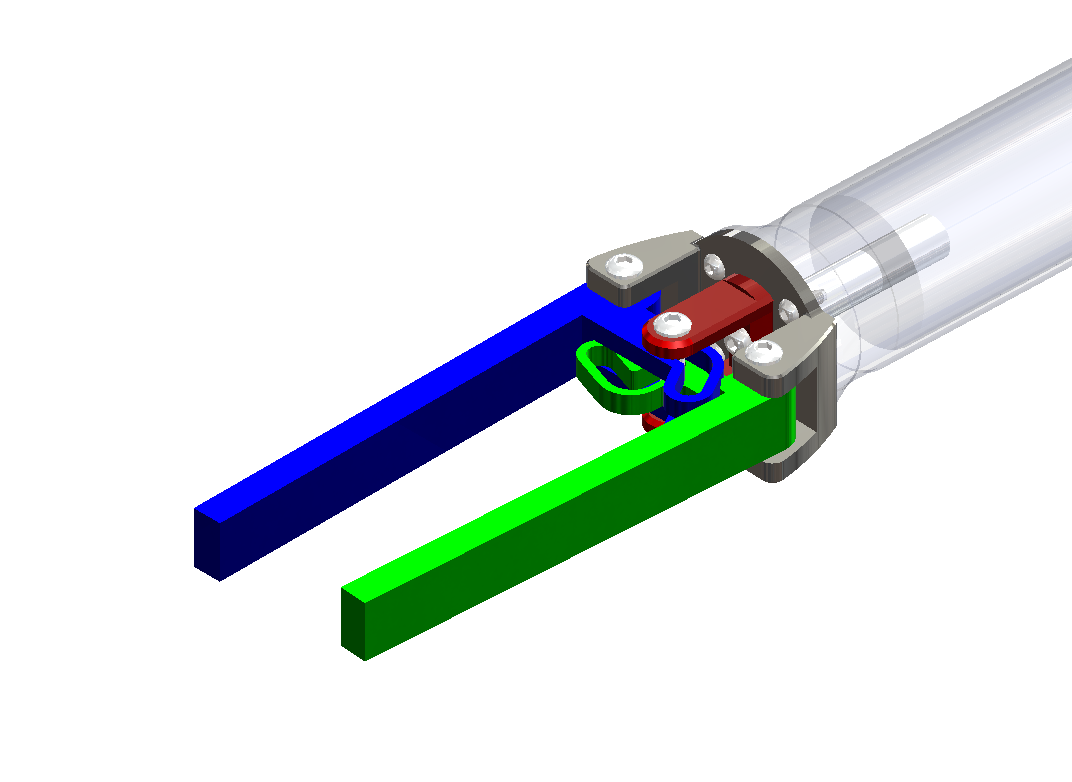
(Isometric of fully closed position)
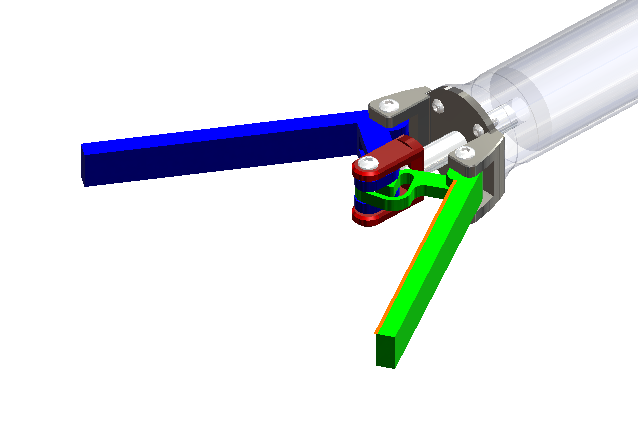
Pin/Slot Testing
We used the 3D-printed model with a more detailed iteration of the pin and slot design with improved slot geometry on the BlueRobotics arm to demonstrate range of motion and movement.
Testing Takeaways
- Force and grip is sufficient to hold samples together on the center plate
- PLA is adequate for testing, but final product should be made in Aluminium
- Linear actuation only retracts 19mm rather than 22mm, meaning the slot geometry allowed for general independent movement of separate arms but needs adaptation



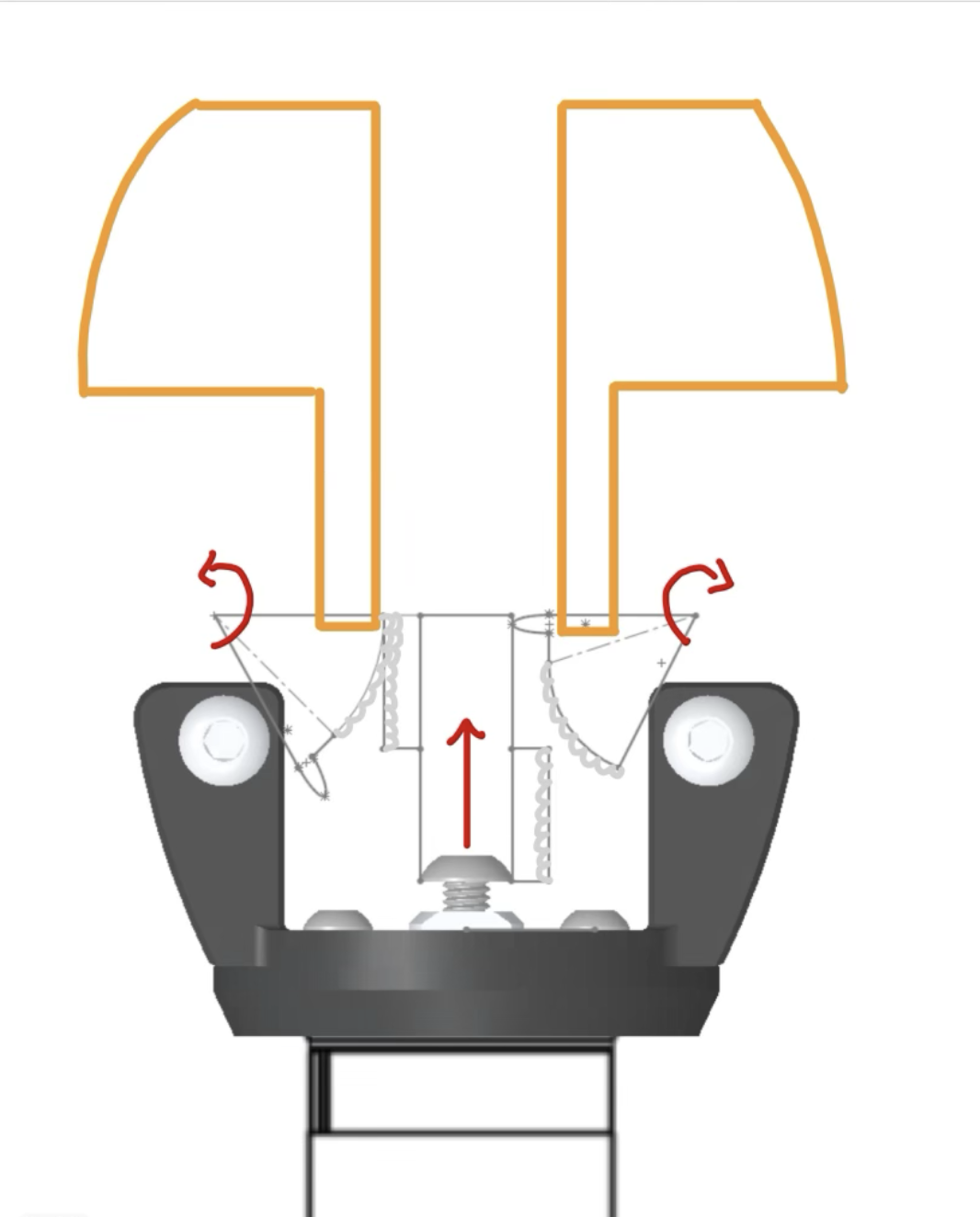
Rack/Pinion
The rack and pinion design is an alternative mechanism that also would allow the two scoops to move independently of one another. Utilizing two gears attached to the arm provides stability for the arms on each side and allows for a wider range of motion of each scoop when collecting sediment. To idealize this mechanism we utilized resources such as 507 Mechanisms and preexisting gear mechanisms. We found that this video was most applicable to our problem statement as we needed to utilize a linear component in addition to the gears.
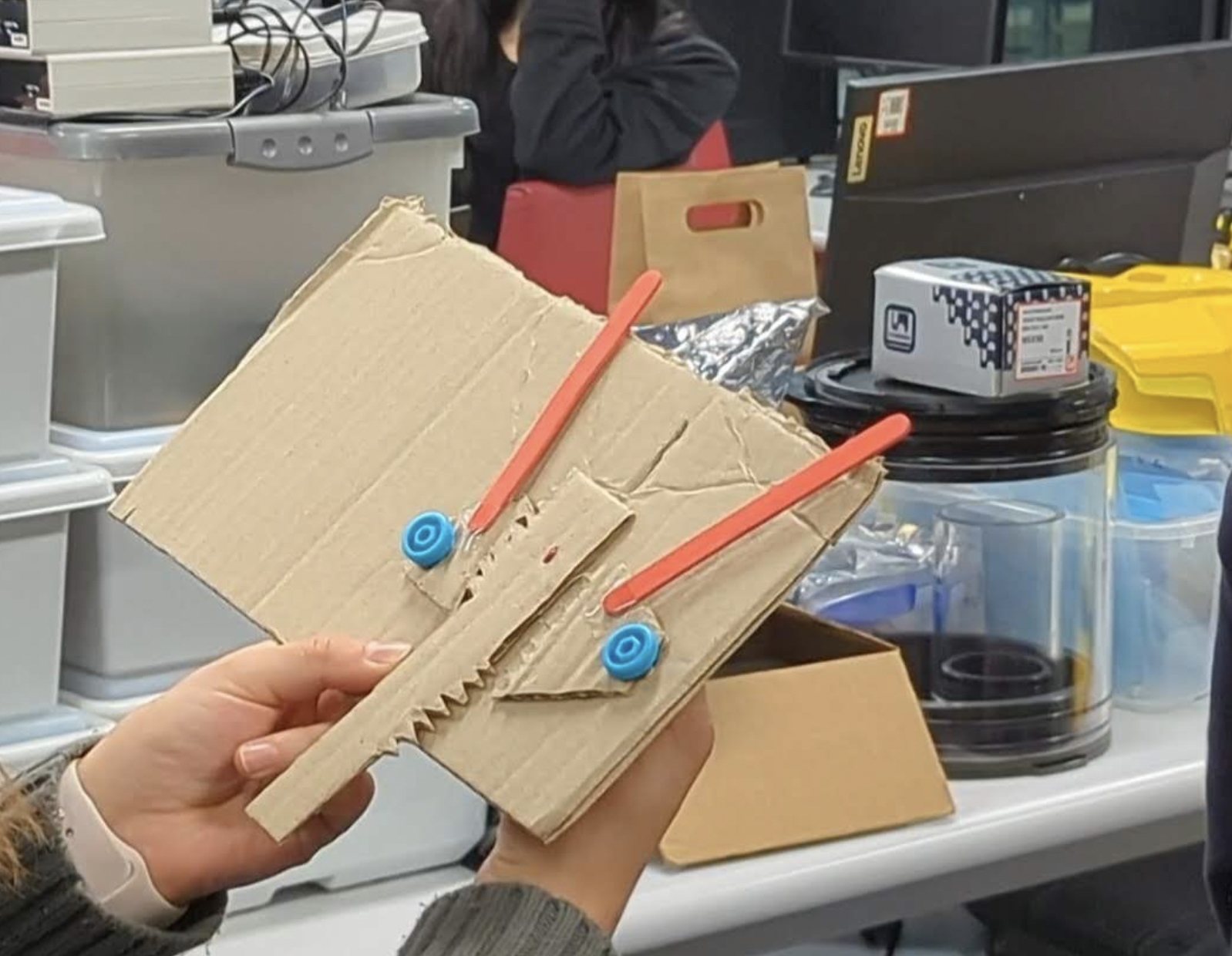
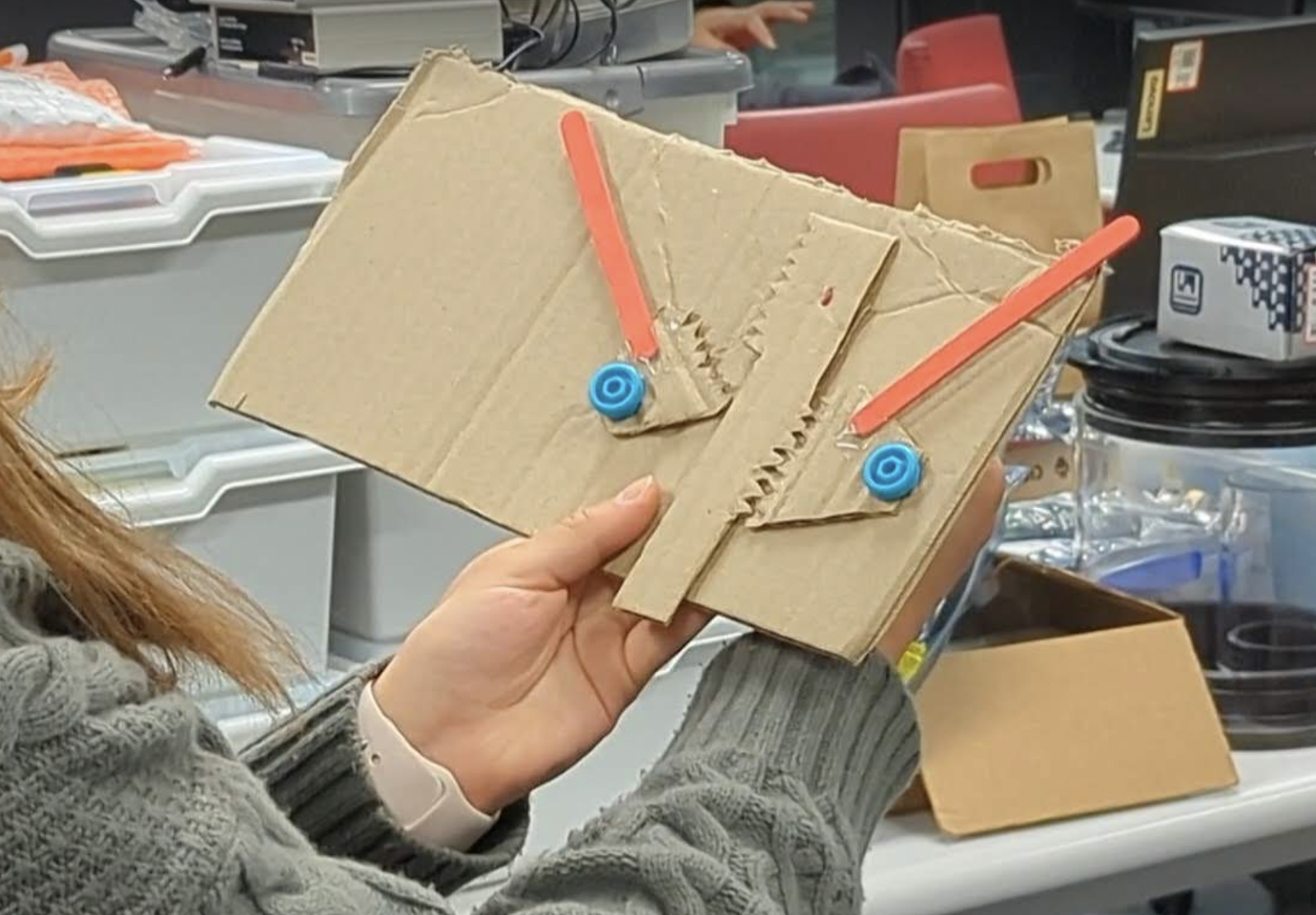
Testing
To test the integrity of this design we made a Lo-fi prototype with cardboard which pulled in each popsicle stick as the “linear actuator” was contracted. We noticed quickly that this design lacked the circular shape that a gear typically undertakes, causing unwanted interference between the actuator and the gears. Due to this we decided to utilize solidworks to work out the geometry necessary for the placement of each gear such that the scoops can retract 45 degrees from their center resting place. Our slot mechanism design only allows for 30 degrees of motion from the place of resting so we found this idea to be worthwhile.
Conclusions and Recommendations
There were many trials in the following testing, iterations, and discoveries with our designs to satisfy the requirements for the UROV arm attachment. Due to time and resource constraints, we conducted the maximum amount of research into multiple design iterations, and can deduce that the best step forward would be to continue prototyping with the rack/pinion design and improve the slot geometry of the pin/slot mechanism. This could be done by utilizing the calculated geometry in our CAD sketches and creating an attachment from these gears to the current arm.
The rack/pinion mechanism provides the greatest versatility in opening angle and ease of manufacture, but has not yet been validated with a high fidelity prototype. Simultaneously, the pin/slot mechanism is promising in its implementation, but requires an edit in the slot geometry to match the full extension of the linear actuation rod. Utilizing curved slot geometry could increase the maximum rotation angle of the scoopers as well as providing better force transfer. Additionally, developing a scoop divider part that is compatible with the proposed mechanism is necessary to create a fully functional prototype.
Our prototyping and design process was heavily mechanically-based, as our team is only composed of Mechanical Engineers, causing certain considerations like environmental factors to be overlooked. Additionally, we generally lacked knowledge of electrical components of the robot and therefore avoided editing any of those features or pursuing projects in which this was required. This project proved to us how important it is to have a team of diverse minds when going through long design projects and believe that future implementations of our design should be modified by other specialties in engineering.