 Benedetta Lia Mandelli
Benedetta Lia MandelliWhat if we opt for one of these choices?
Our concept for the new mechanism is to enable pinch grip through a mechanical system while adding an electronics to allow for precise control of the pinch.
The two actuators on which we are focusing are:
| ELECTRIC LINEAR ACTUATOR | SERVO MOTOR |
| A linear actuator is an actuator that creates motion along a straight line. It can be mechanical, electric, pneumatic, or hydraulic. 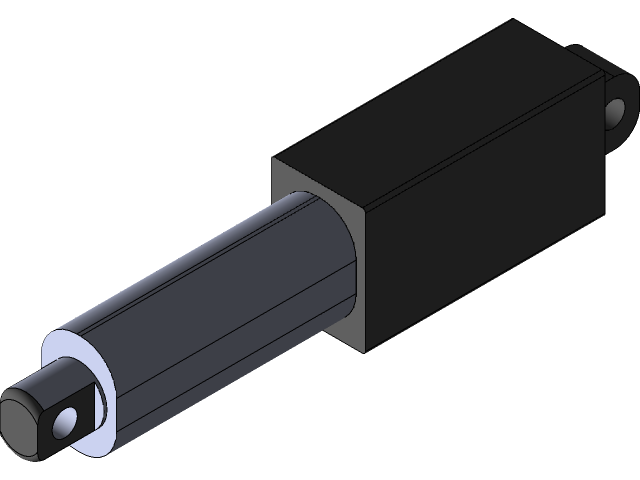 An electric servomotor typically needs to have low inertia, high voltage-to-speed and current-to-torque linearity, smooth rotation or translation, and minimal torque or force oscillation. It should also have no preferred positions and be capable of withstanding sudden power surges. | Here is an image of an RC Servo Motor that we could use to implement the pinch force regulation. A servomotor is a specialized motor, typically of small power, designed to handle wide and sudden variations in operating conditions. Unlike conventional motors, it must quickly and accurately adapt to changes in speed, driving torque, angular acceleration, operating cycle duration, and angular velocity. Servo motors are valued for their ability to provide high precision and control, which makes them essential in systems requiring accurate and responsive motion control. An RC (Radio Control) servo motor is a small, lightweight motor used in radio-controlled models. It controls angular positions within a 0 to 180-degree range. |
Here are some open questions we were able to ask WERO:
- What if we choose one of these options?
- What if we use a potentiometer to control and adjust its position, thereby increasing the pinch force?
Thanks, WERO, for your support!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.