 akash asbro
akash asbroProject Description:
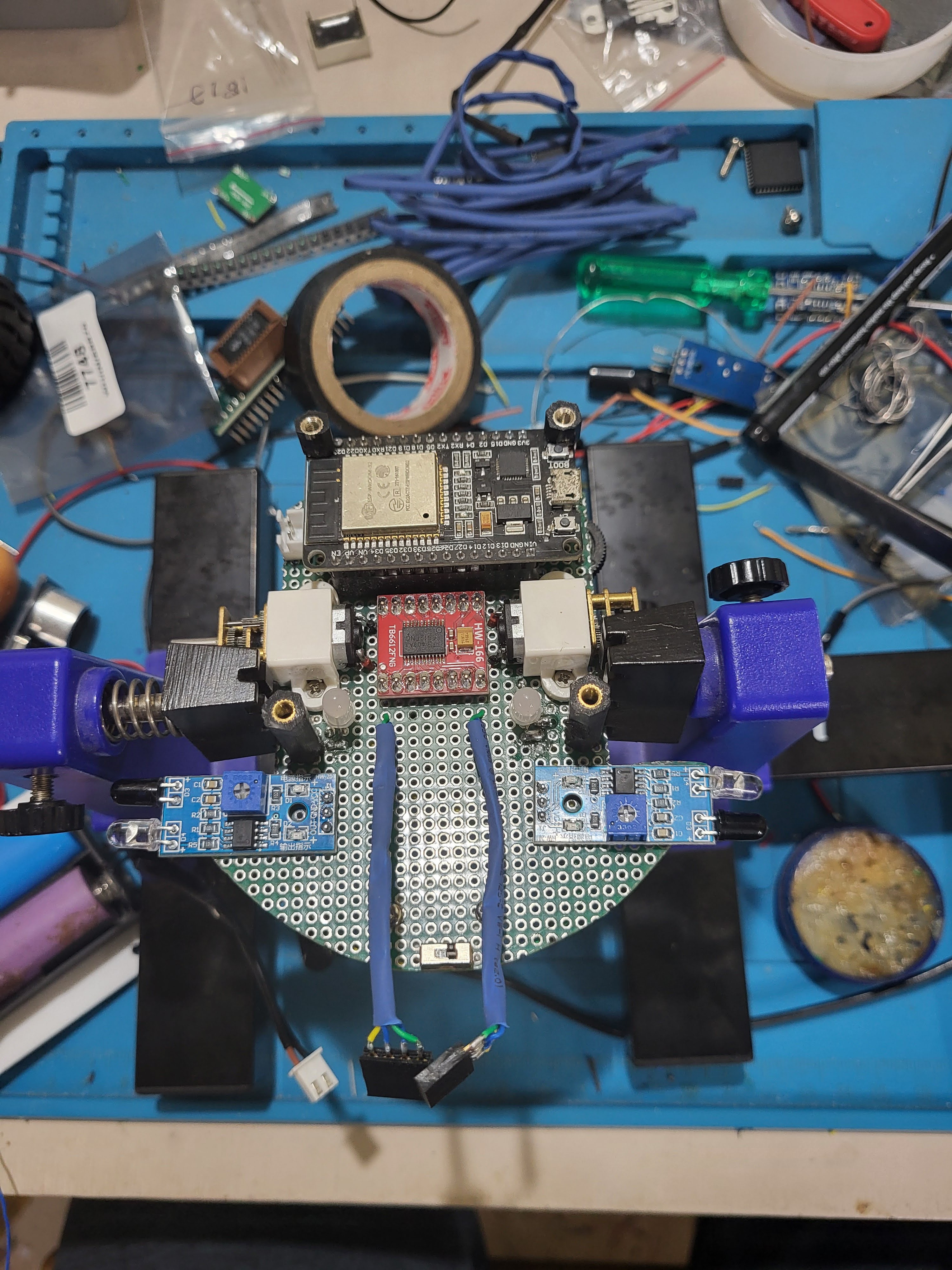
This maze solver is designed to efficiently navigate mazes using a combination of PID control and Boolean logic for accurate positioning and path detection.
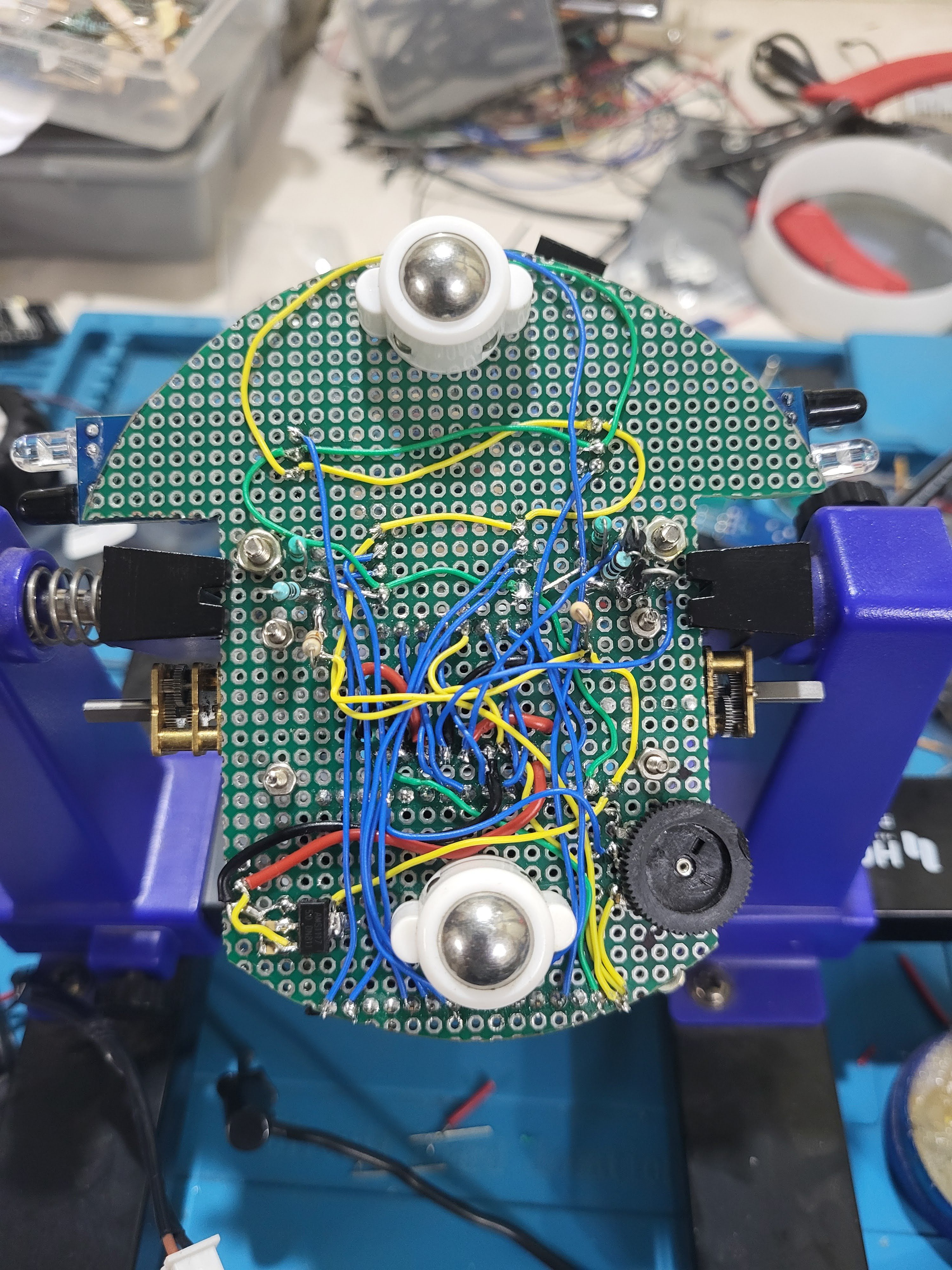
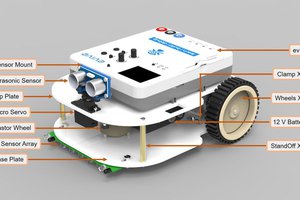
- Positioning: To maintain the robot parallel to the wall, two ultrasonic sensors are placed on front side of the bot. These sensors continuously feed distance data to a PID controller, which adjusts the robot's positioning to ensure it remains parallel to the wall, improving stability during movement.
- Path Detection: For detecting the presence or absence of walls, two IR sensors are placed on the left and right sides of the robot, facing the walls. These sensors work based on Boolean logic, detecting whether the path ahead is clear or blocked by a wall. This guides the robot’s decisions to turn or proceed forward.
- Minor Positioning: During fast turns, the robot may lose its alignment slightly. The PID controller is only activated when a front wall is detected, meaning it cannot assist when the robot is navigating a turn without a front obstacle. To address this, two IR sensors are placed at 45-degree angles relative to the robot’s axis. These sensors monitor the robot’s alignment and detect when it is about to hit the wall. This allows the PID system to make real-time adjustments, keeping the robot correctly oriented even when no front wall is present.
- Middle Block Problem: In cases where there are consecutive turns that prevent the PID from functioning effectively, the robot can sometimes hit the walls and stop. To overcome this, an additional IR sensor is placed in the center of the bot. If a collision is detected, the robot reverses slightly and repositions itself to continue on its path without getting stuck.
 ensafatef
ensafatef
 evive toolkit
evive toolkit
 ssla-couk
ssla-couk