 tom
tomInitial Project Goals:
- Keep the board design affordable and easy to assemble.
- Target of 4-layer, single-sided components
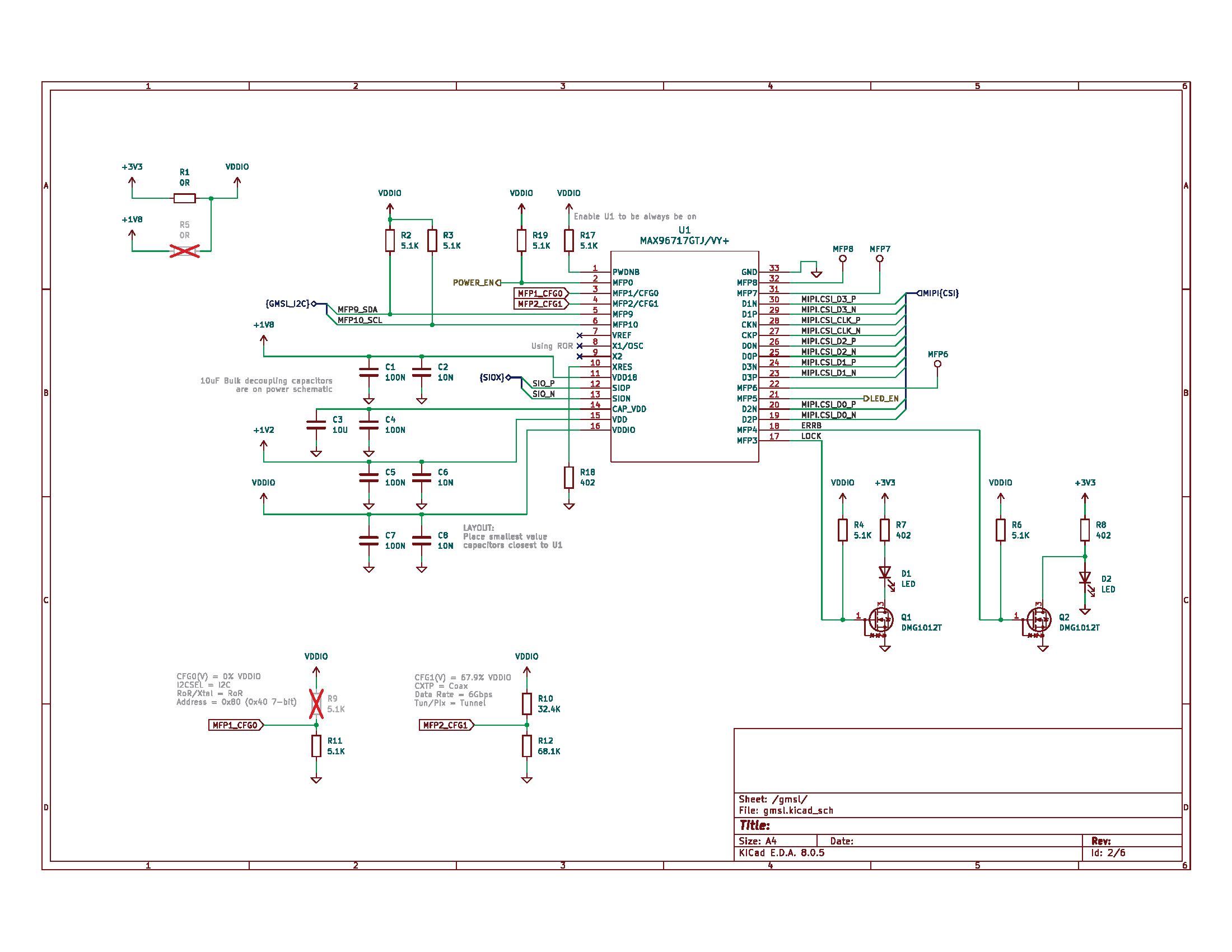
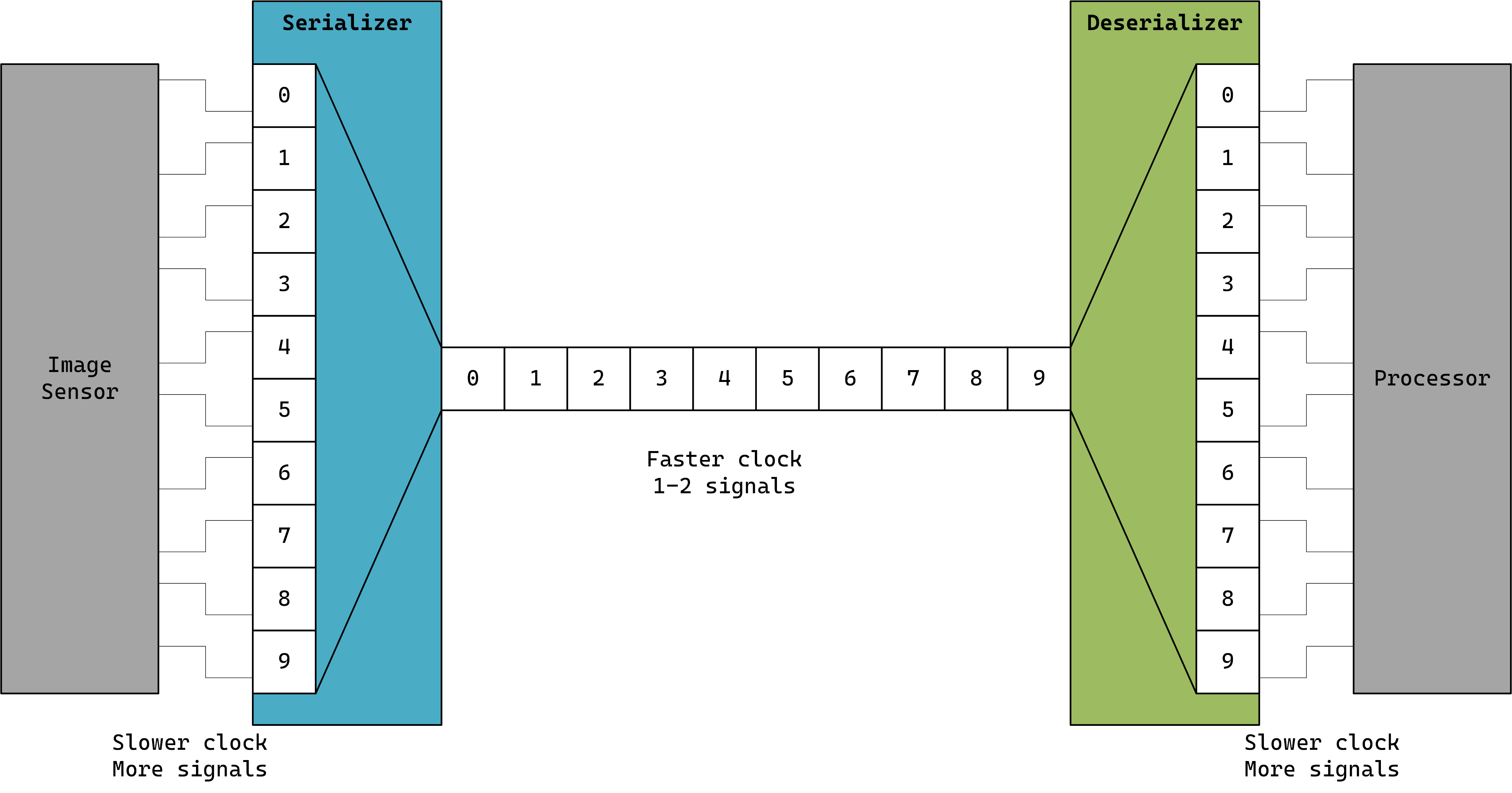
- Walkthrough all the design challenges and considerations of a SerDes design.
- Routing MIPI-CSI2 traces, routing GMSL traces, planning for multi-function pin usage, power supply considerations, leveraging power-over-coax capabilities.
- Use all off the shelf components, documentation, and design resources
- Leverage public design guides and create the project in KiCad 8.0 for open source usage
- Enabling more people to add cameras to locations that may not have been feasible before.
- Learn myself!





 imoralesGT
imoralesGT
 Frédérik Berthiaume
Frédérik Berthiaume
 Marius Popescu
Marius Popescu
 Kuldeep Singh Dhaka
Kuldeep Singh Dhaka