 Andrei Gramakov
Andrei GramakovI was not fully satisfied with my design for 2+ levels.
It has 3 flaws:
- The middle level part is different with the others → it can be used only in 2+ configuration
- The vertical mounts are significantly different for each configuration: 1, 2, 2+
- While the bending of the construction perpendicularly the vertical mounts resist the bend, bending along the vertical mounts depends on the printing precision and might allow the levels to dance left and right.
Here how I finally solved all these problems
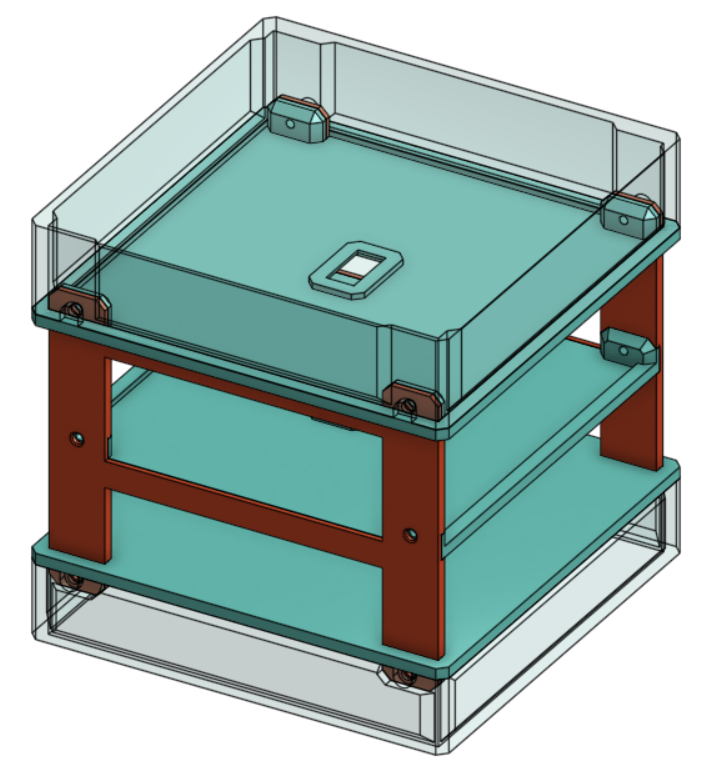
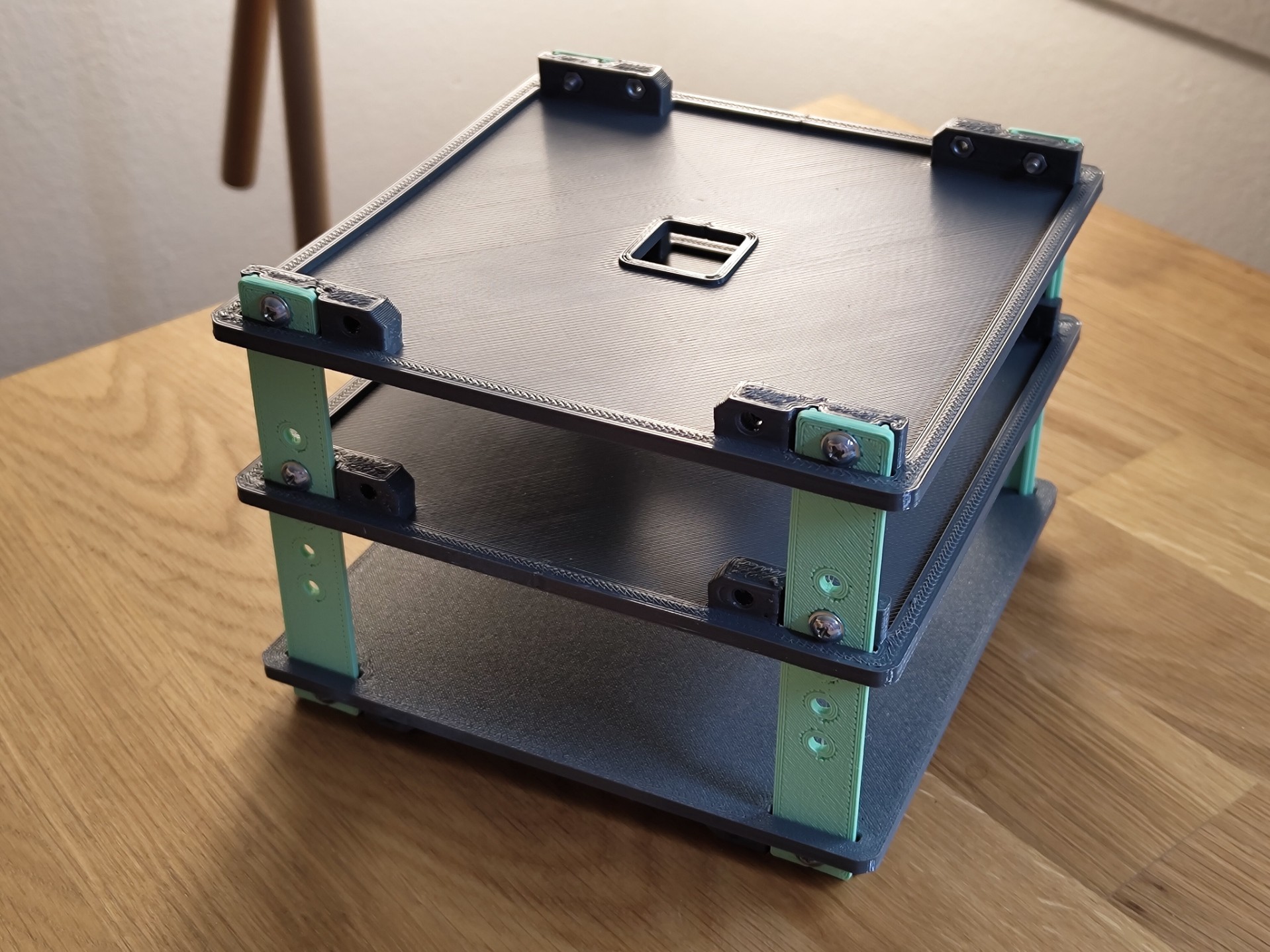
1. I replaced the vertical mounts with 4 perforated bars, now I can use the same parts across all the assembly, and decrease the amount of part types
2. The bars can have multiple mounting holes to adjust the assembly needs. The lanes themselves can differ only by the length.
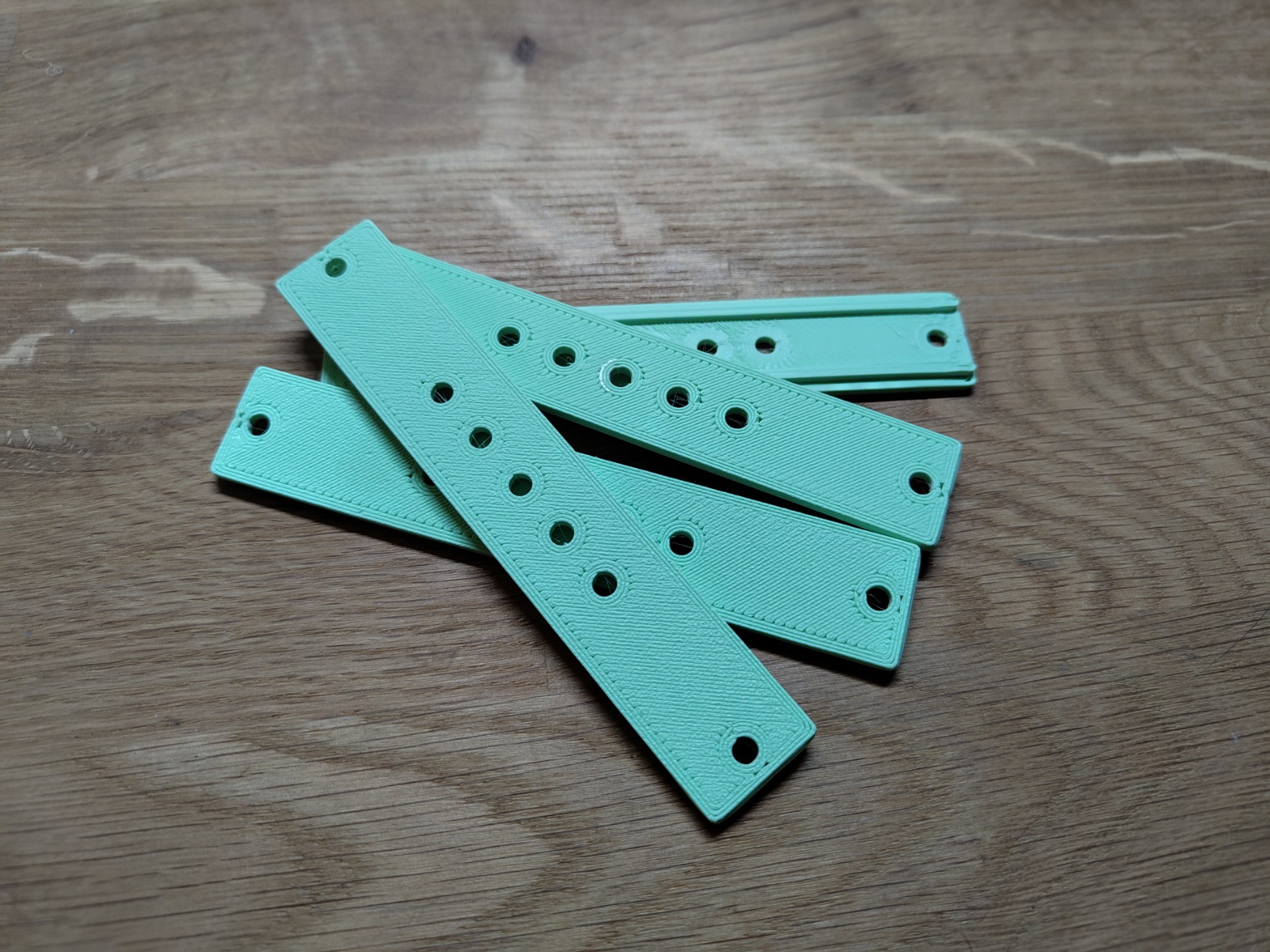
3. The bars of the photos above has two directing bumps to center the position and resist bending perpendicularly to the bar main plane. Today I went farther and made the pattern more complex to improve the qualities


Extra Update. I also embedded nuts onto the mounts, so the connection can be stronger and more reliable

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.