 Ethan
EthanRecent progress has shown the one Arduino Mega clock is too slow to handle 4 simpleFOC drivers and various other tasks.
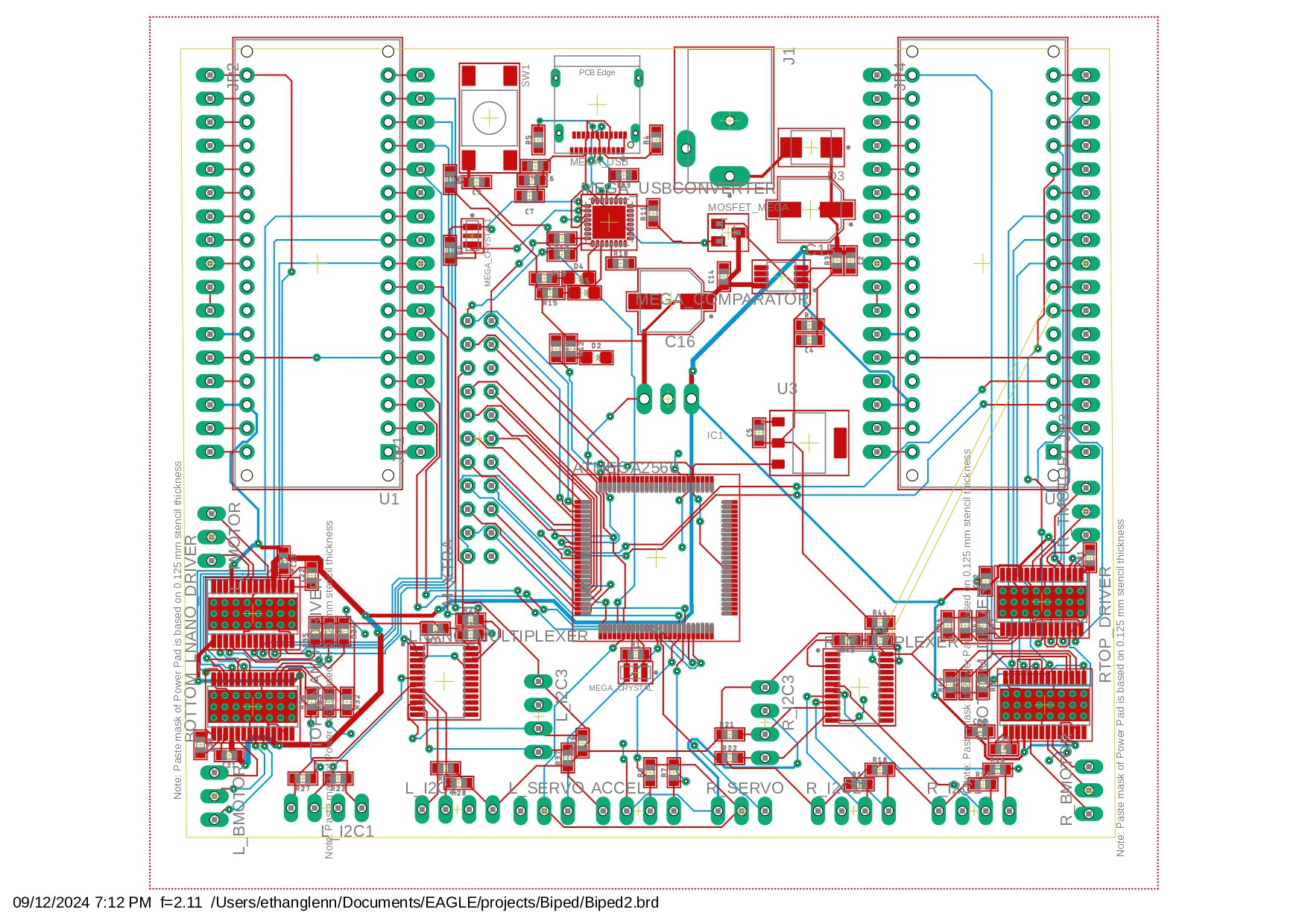
I tried to remedy this with custom PCB, containing an Arduino mega, two Arduino micros, 4 simple FOCs, and two multiplexers. In this design, the two micros would each control 2 motors and 1 multiplexer, with the Arduino mega handling the rest of the tasks. The custom PCB worked, but the bottom FOC drivers on both sides still had some jittering issues.
I’m planning to change my approach to the problem. I'm going to change the design of, not only the circuit but the physical robot as well. Currently, I've been using a modified version of the “TipTap” robot, testing out his design. I've Identified some changes I would like to make.
Software update coming soon!
Information on my new approach will be posted at a later date.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.