 Abomination named Alex
Abomination named AlexI've always been curious about what lurks under the lakes and rivers, but have never really had the opportunity to explore as I've wanted to. Sure snorkeling is an option but quite frankly I can't hold my breath for nearly long enough to make that viable. SCUBA diving has always been interesting, but between equipment expenses, certification, and getting cold in a murky lake... I'll pass. Much better to have a faithful robotic friend do the exploring for me!
And thus this project was born
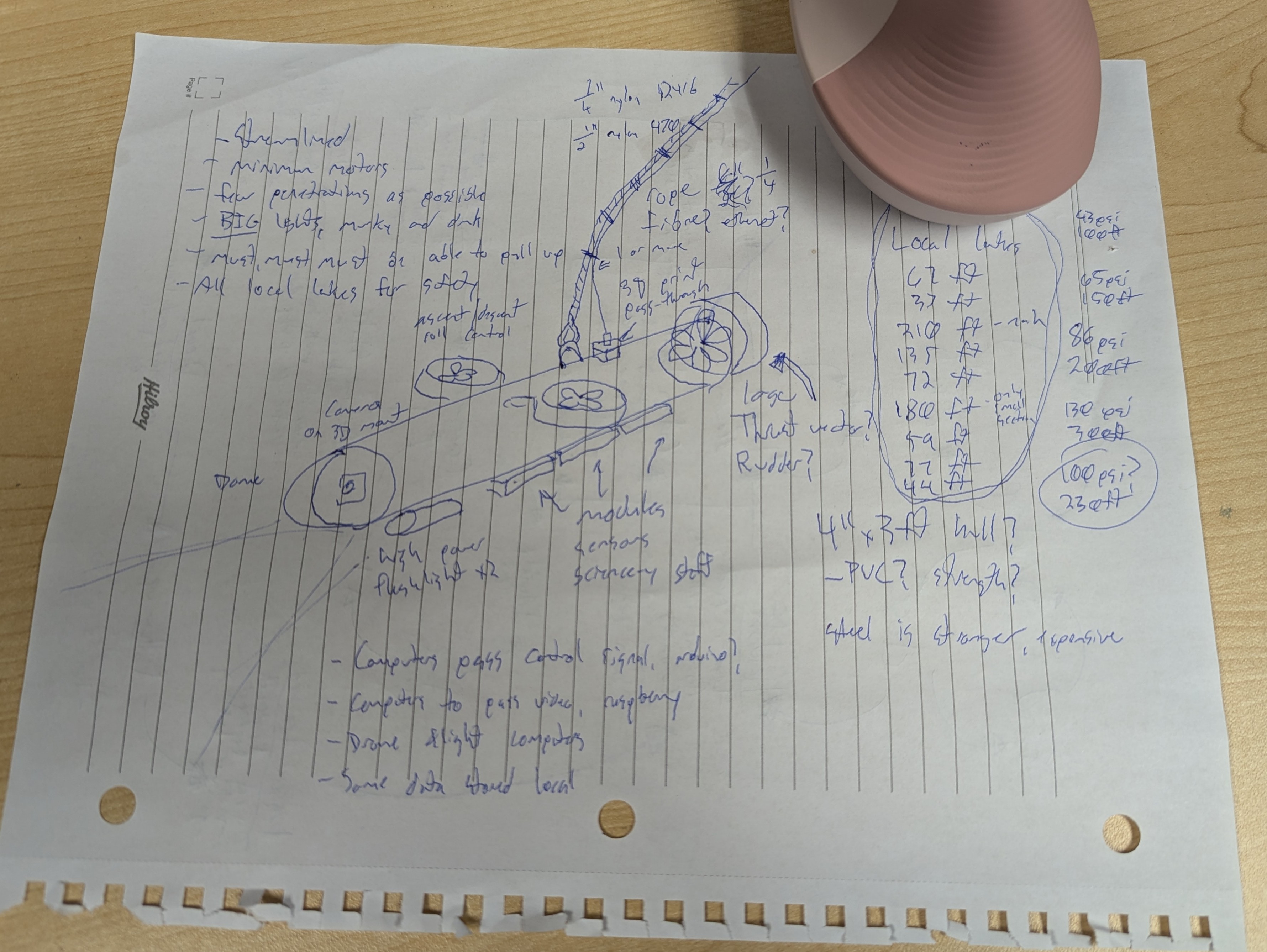
This project is intended to not only build a ROV but to be a stepping stone into further exploration. I'm keenly aware this will be a poorly-optimized first swing. So I've identified some basic goals beyond just wasting my free hours creating something of dubious utility but immense recreational value. these include:
- Of course functional ROV I can bother fish with
- Building knowledge and experience in underwater systems. What are the best practices? what works and what doesn't? what fun design considerations will I overlook?
- Construction and design knowledge for watertight and submerged items. How do I actually build the damn thing?
- Software-side experience
- A platform to allow expansion into other areas of underwater science, engineering, and overall hackery
The ROV itself needs to meet some bare minimums:
- Watertight and survivable in our local lakes. this goal is somewhat loosely defined. I'd like to see >100ft depth "rating"
- Thrusters to allow navigation. Faster is better, but stability is most important.
- A camera to allow navigating and cause seeing whats down there is kinda the whole point
- Fail-safe retrieval. even in the event of complete onboard failure or loss of communication it must be impossible for the ROV to be irretrievable.
- Present a minimal environmental or fire hazard. Please don't burn down my house.
And we need to recognize some limitations:
- I am not an engineer. There will be math, but there will also be doing what feels right. learning how to replace what feels right with more math is one of our goals but sometimes the rationale will be "lol idk"
- This will be built with my beer money. There will be a continual emphasis on cost reduction. I recognize there are many commercial off-the-shelf solutions that will be better in many circumstances, but budget comes first.
- My tools are limited. I don not have a 6-axis CNC machine in my basement. There will be no welding, electron beam or otherwise. if it's more complicated than a 3D printer or an oscilloscope it might not be within my reach.
- My coding skills are not where I want them to be.
I'll be publishing logs quite frequently, as well as trying to generate an accurate BOM as we go. CAD or STL files can be made available if there's enough interest, we'll feel that out as we go.
The first handful of logs will be retrospective, and titled as such. Once the documentation catches up with development you'll see that reflected in the titles.
I hope you enjoy these chronicles as much as I enjoy the construction!


 Peter Walsh
Peter Walsh
 Paul McClay
Paul McClay
 Supplyframe DesignLab
Supplyframe DesignLab