 Dustin Johnson
Dustin JohnsonGit Repo:
https://bitbucket.org/di0/fuff-over-i2c
BOM:
2 x WS2812B RGB LED Array:
-- Amazon Link:
https://www.amazon.com/gp/product/B0C7C9HP9R/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1
-- Digikey Part Link:
https://www.digikey.com/en/products/detail/adafruit-industries-llc/2226/5878434
-- Datasheet:
https://www.digikey.com/en/htmldatasheets/production/2371852/0/0/1/ws2812b-led
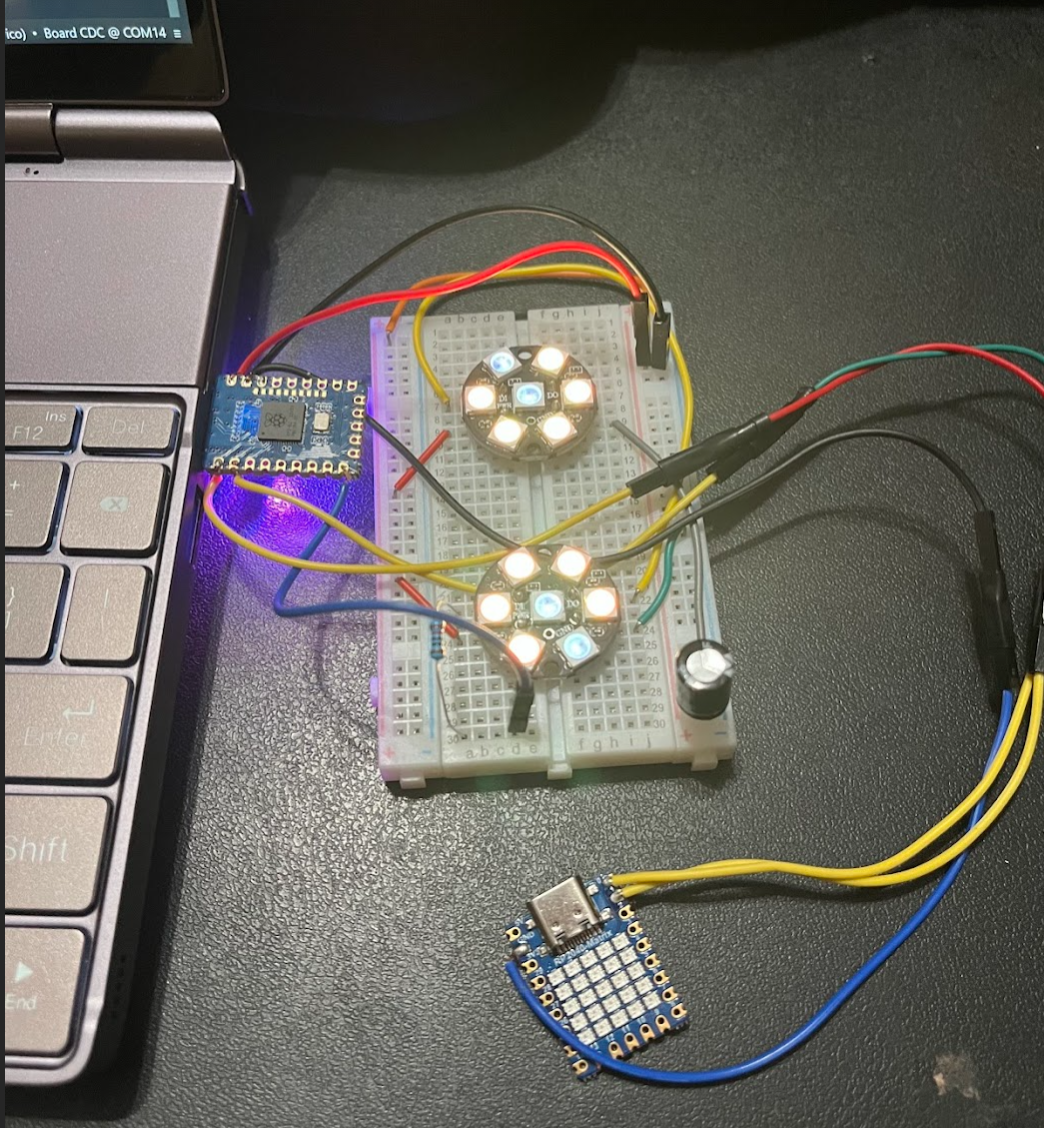
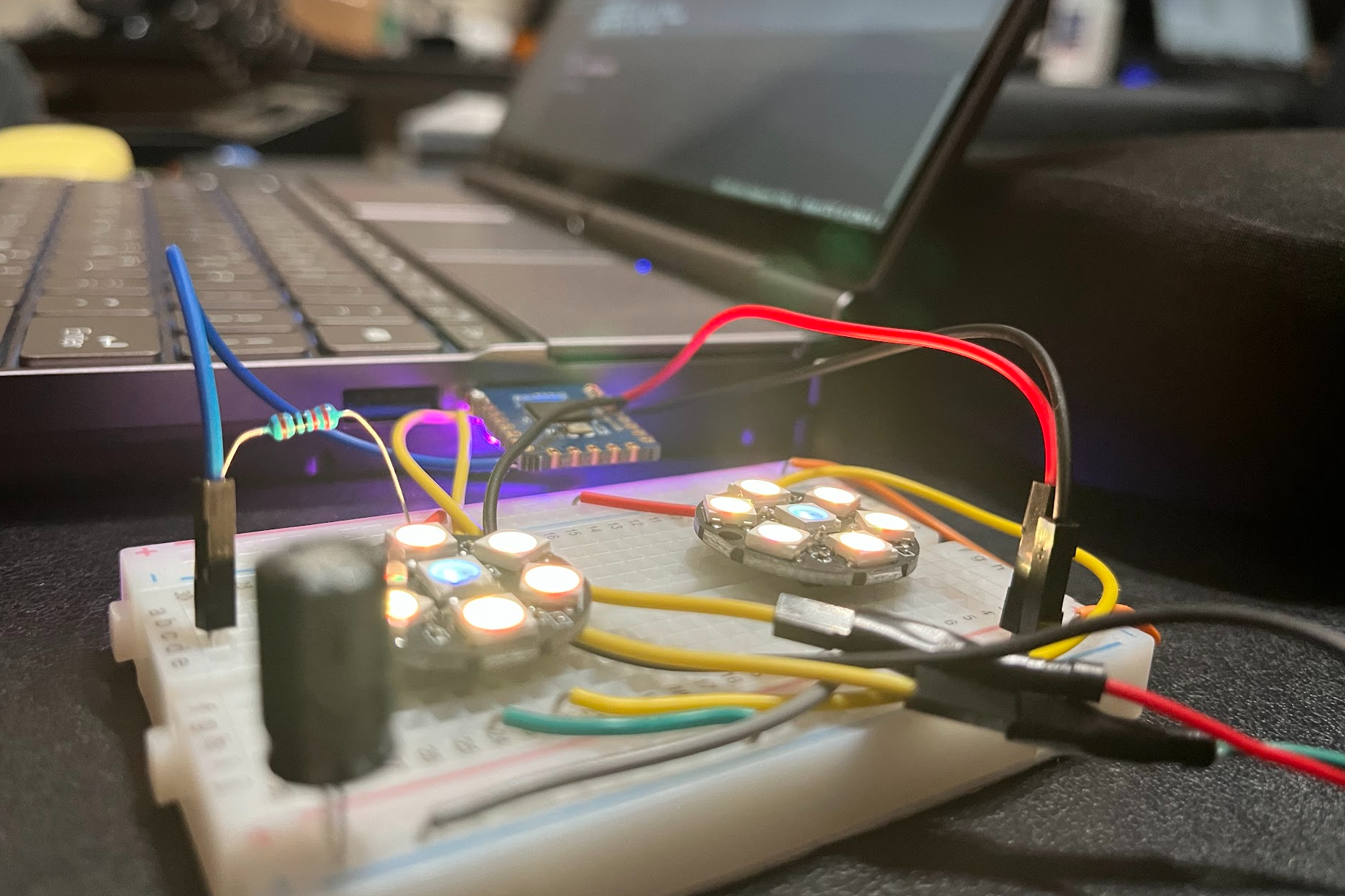


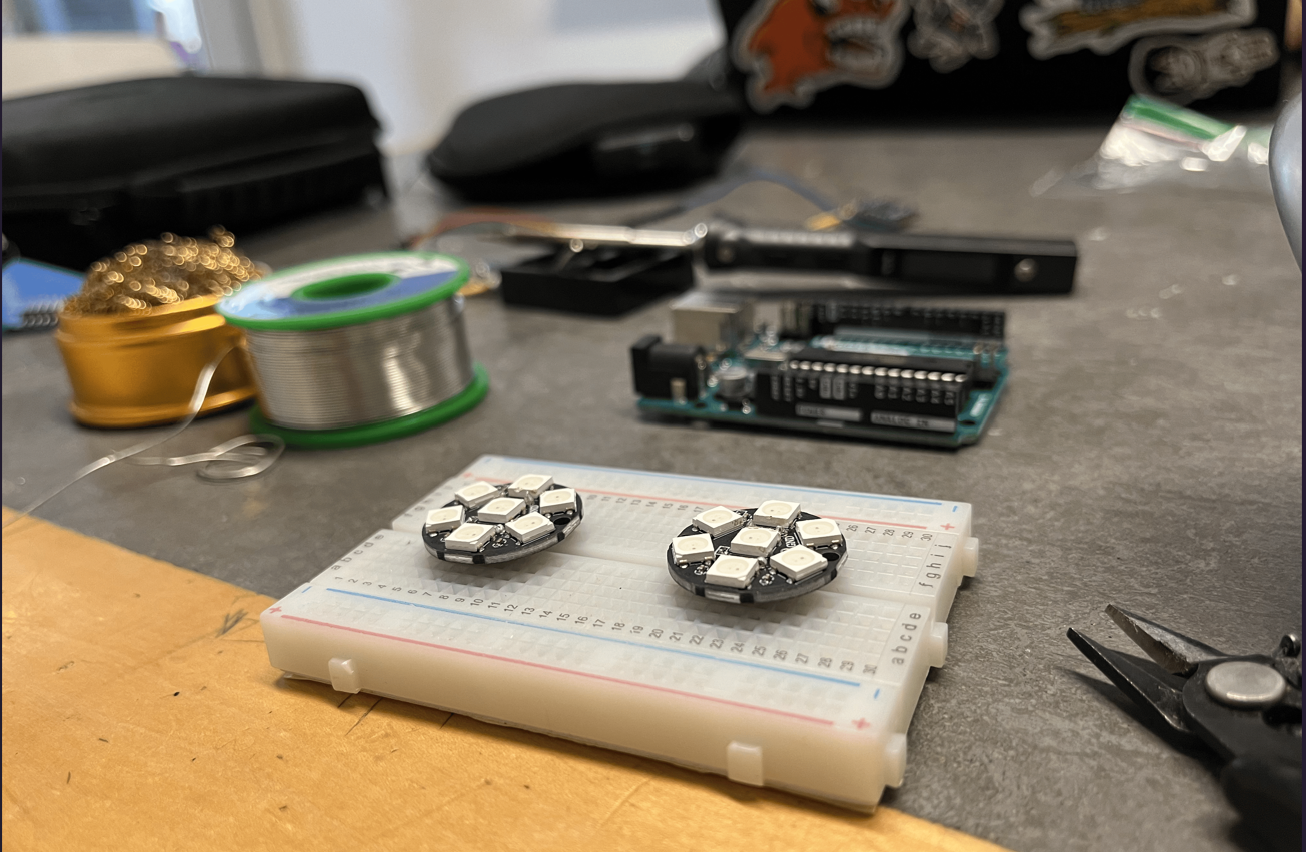
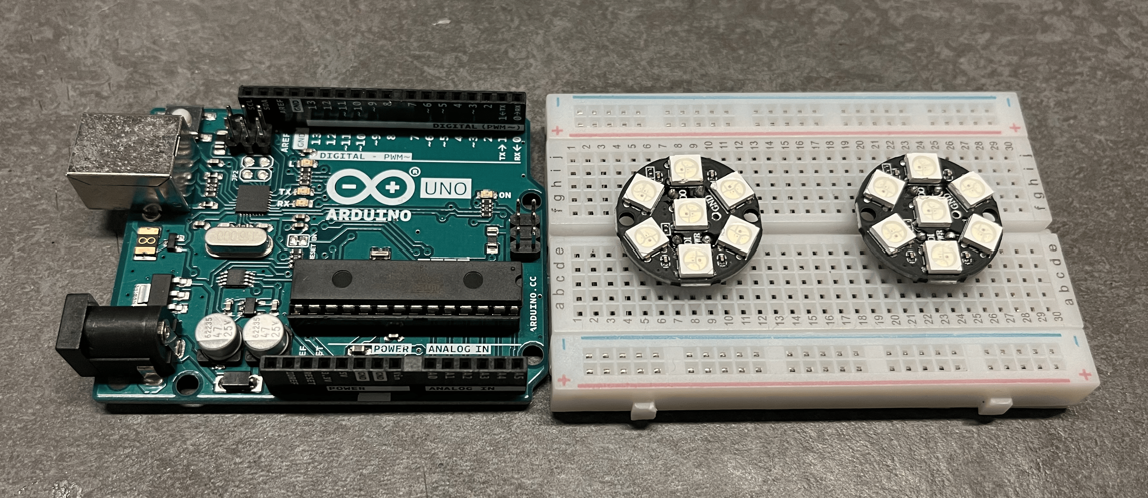 I broke apart and soldered some headers on the RGB LED arrays, so they'd fit in the breadboard. I arranged to represent the Cassette Tape Spools in the same way the PCB will have them reverse-mounted against the prepreg diffuser.
I broke apart and soldered some headers on the RGB LED arrays, so they'd fit in the breadboard. I arranged to represent the Cassette Tape Spools in the same way the PCB will have them reverse-mounted against the prepreg diffuser. 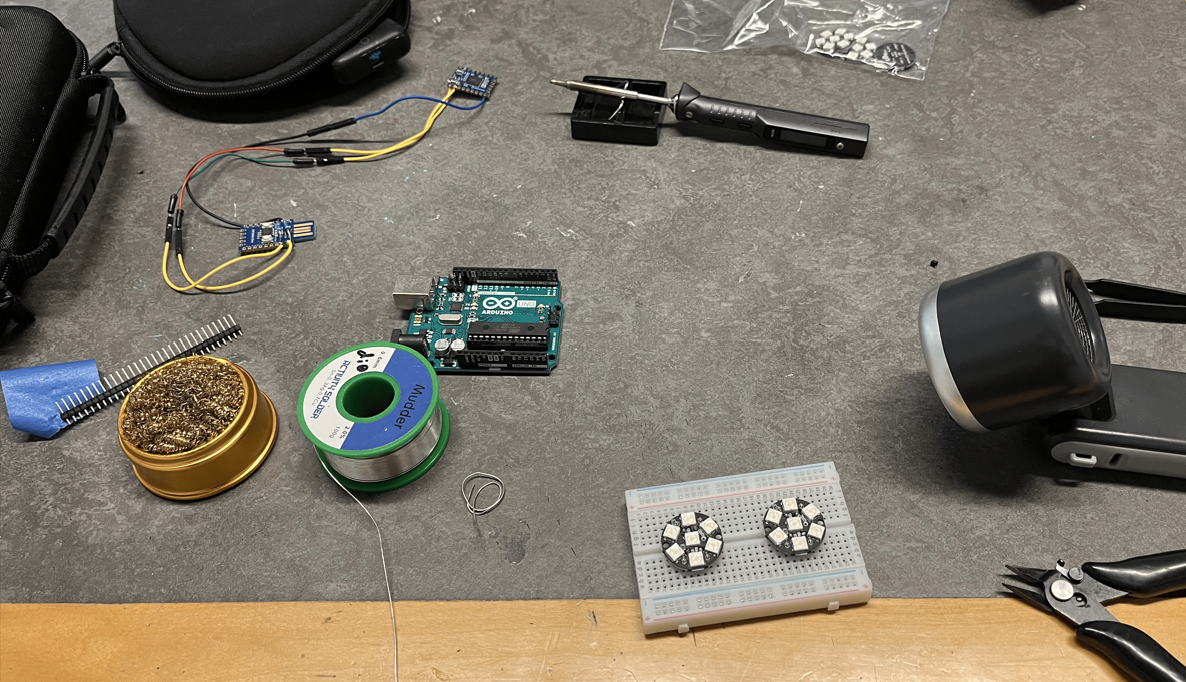




Take your time: but that's awesome. :)
BREAKING NEWS: 2024 SUPERCON SAO CONTEST DEADLINE EXTENDED