 kelvinA
kelvinAI've been considering the potential options for the hand pose to use (e.g. like a glove, like holding a vertical mouse) and I've come to the conclusion of 2 sides of an extrusion that can rotate up to 45 degrees:
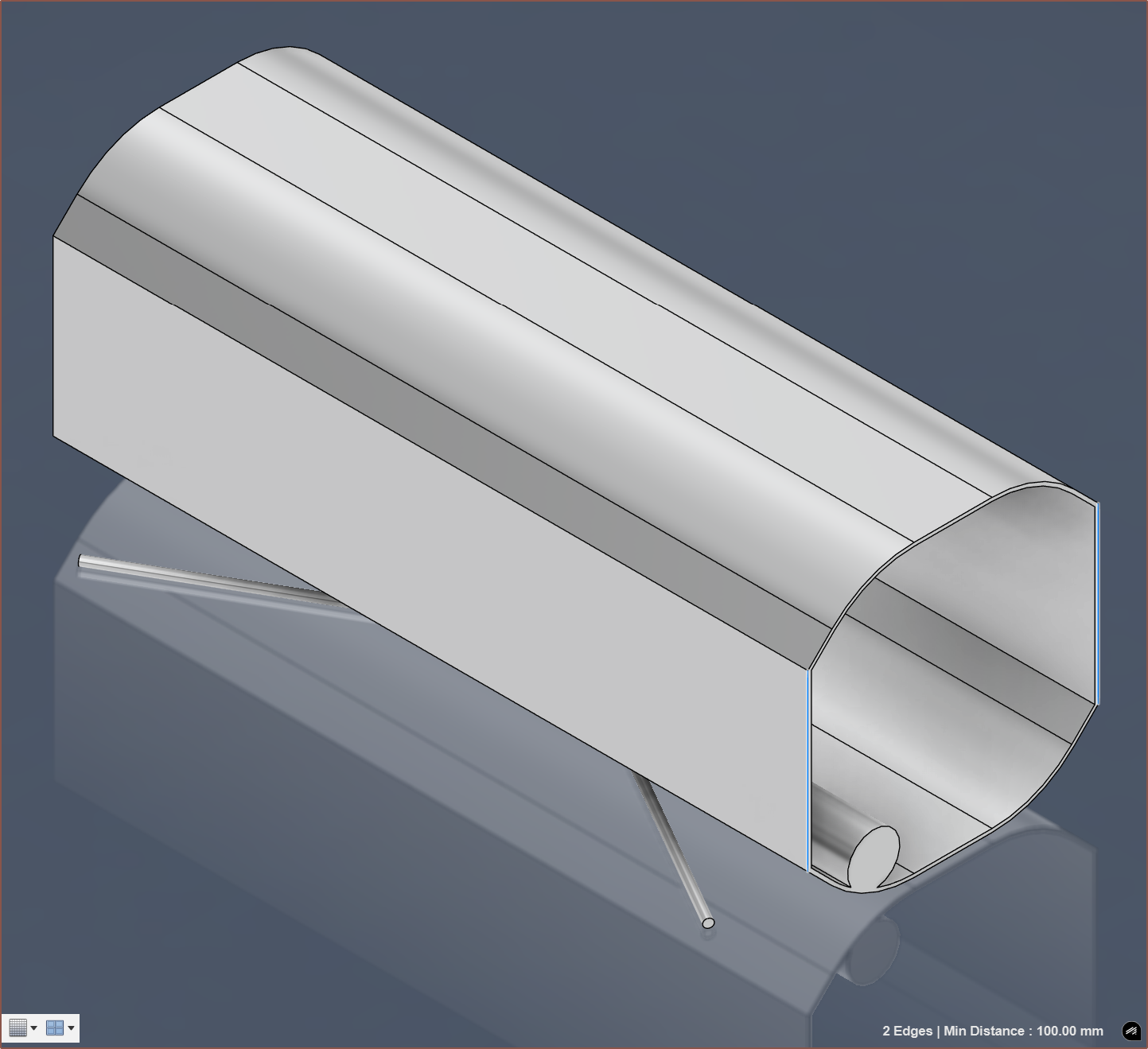
- The entire "keyboard" is sheathed in the tube seen above, allowing for easy transportation.
- The tube also acts as a wind guard.
- It allows good ergonomics from the range "crouched on the floor" at 0 degrees to "sitting at a desk" at 45 degrees rotation.
- The edge of the desk acts as an armrest.
- The hand pose is somewhat natural, like holding a cylinder from the top.
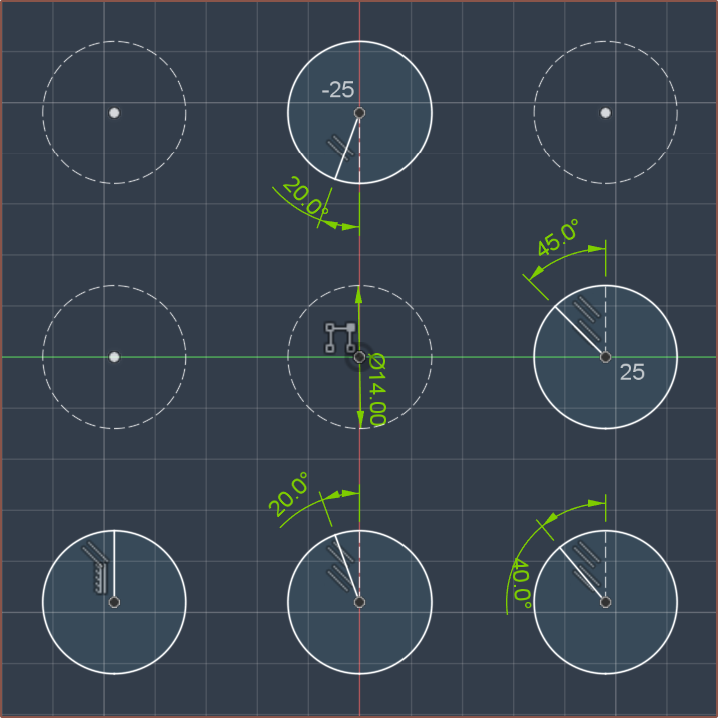
A basic-looking arrangement of the right-hand fingers is shown below, shown with their angle of direction (aka towards touching all fingertips):
The tube at the moment is 250mm long and 100x100mm squircle, which is approximately the diameter of a standard UK 2 litre bottle. Do you know what's also approx 100x100mm? Teaching Tech's Spacemouse (2nd Generation):
 I've been trying to rigidly fix the project goalposts, but it's hard to ignore creating a PC input device with no mouse-pointer or scrolling provisions whatsoever. Such provisions are in keyboards ranging from the most expensive to the cheapest: Svalboard, Naya Create, the WK-50 keyboard and generic wireless keyboard+trackpad combos. The below video reminded me that I really should consider something:
I've been trying to rigidly fix the project goalposts, but it's hard to ignore creating a PC input device with no mouse-pointer or scrolling provisions whatsoever. Such provisions are in keyboards ranging from the most expensive to the cheapest: Svalboard, Naya Create, the WK-50 keyboard and generic wireless keyboard+trackpad combos. The below video reminded me that I really should consider something:
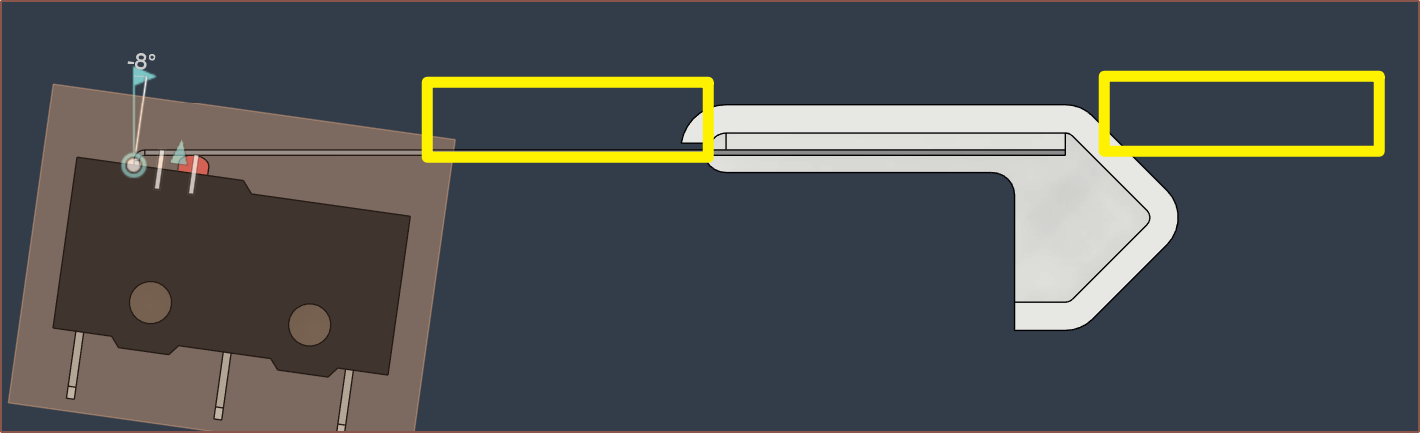
I probably spend just as much time scrolling through the web as actually typing anything, and if working outside, current standalone options (mice, trackpads, optical finger navigation) expose my fingers to the cold. That's why I'm wondering if it's possible to have an area slightly before/after the fingertip keys that the fingers could grip on and have the 5 keywells become the spacemouse knob:
 This would allow me to use a strategy like 3DxPoint to get mouse and scroll movement, and allow for full 6-axis control to be implemented at some future time.
This would allow me to use a strategy like 3DxPoint to get mouse and scroll movement, and allow for full 6-axis control to be implemented at some future time.
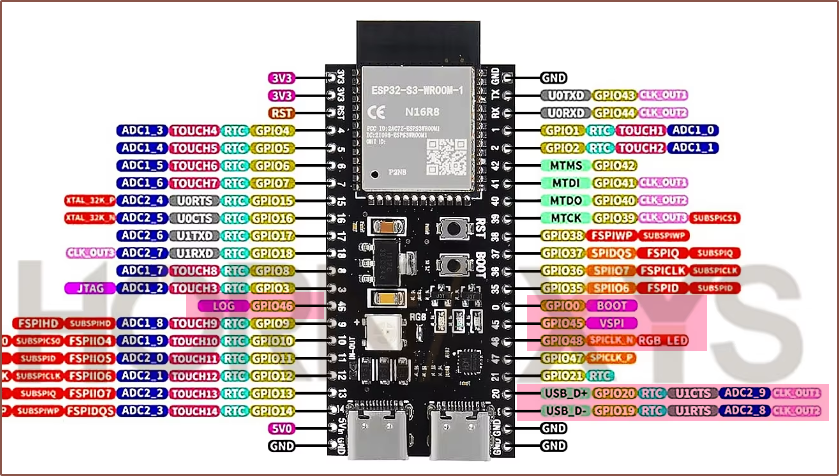
Ergonomic limitations notwithstanding, the issues are the additional time it may take to implement and that, for the 8 joysticks, I'd need 16 analog pins. Technically, I should only need 6, but then I'd have to look into the computational issues TeachingTech faced and I'd rather not. Looking at the ESP32-S3 development board, it looks like there'd be just enough pins for the 16 joystick and 14 matrix pins.
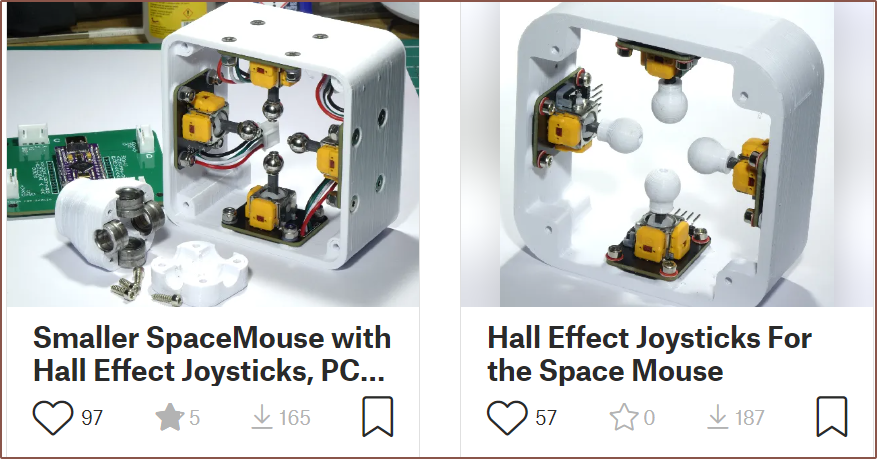
I've looked into the remixes and a user called Kempy has decided to use PS5 hall-effect joysticks instead of the questionable PS2 resistor-based ones, minimising the deadzone and allowing for smoother control:
 They made the PCB available on ebay and it'll only be a one-time fee of about £9 to use the PS5 sticks:
They made the PCB available on ebay and it'll only be a one-time fee of about £9 to use the PS5 sticks: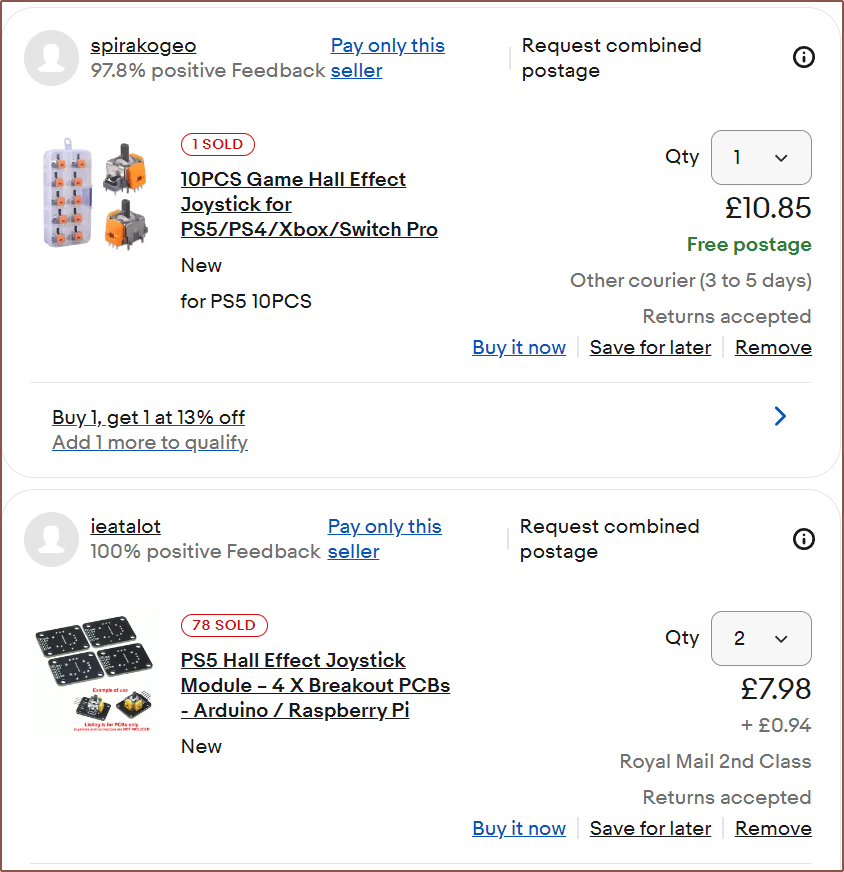
- stainless
- bead
- ball spacer
- 2mm hole
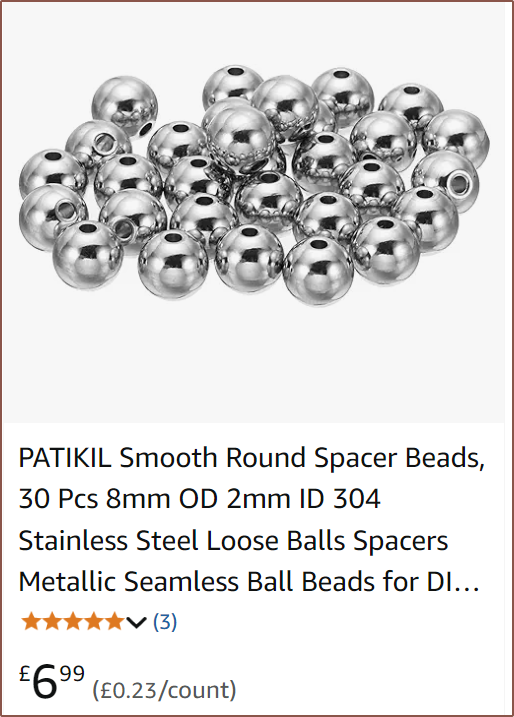
 In my search, I did also see acrylic and glass beads, but their roundness is likely questionable for this application. I may consider just printing using SLA printed ball ends for the joysticks.
In my search, I did also see acrylic and glass beads, but their roundness is likely questionable for this application. I may consider just printing using SLA printed ball ends for the joysticks.[Jan 05] I just had the great idea to simply keep chord 22 reserved for enabling mouse mode! I'll try and explain quickly:
- The "directions" that a right-handed finger inside a keywell can go are numbered to reflect the numpad. The physical buttons are:
- 1 - southwest
- 3 - southeast
- 9 - northeast
- 7 - northwest
- The remaining ones are by pressing 2 buttons, with '5' being pressing all 4 buttons.
- The main idea of Tetwice is that 2 fingers are used to chord 1 button, such as the 'a' key or 'esc' key.
- Chord 22 essentially means pressing the two fingertip buttons on 2 fingers.
- The idea is to detect if this is happening, since a user needs to do this to be able to grip the manipulator so that they can move it in 6 axes anyway.
- Since the thumb is needed to grip anything, mouse mode will auto disable if both of the bottom thumb keys are depressed.
And profit! Without ever really needing to move much at all, a user can intuitively switch between keyboard and 3D-mouse modes.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.