 kelvinA
kelvinAGinfull joysticks
I've spent about an hour or two jointing up the joystick assembly so that I can drag the stick and everything moves (as an approximation):
I also talked with a user on Printables who informed me that they preferred the stiffness of a traditional spacemouse. I already had worries that the joysticks might not be stiff enough in the orientation I'm planning, so I started researching into increasing joystick tension. First I measured my SpaceExplorer, which was 300gf. Then I started looking inside the joystick.
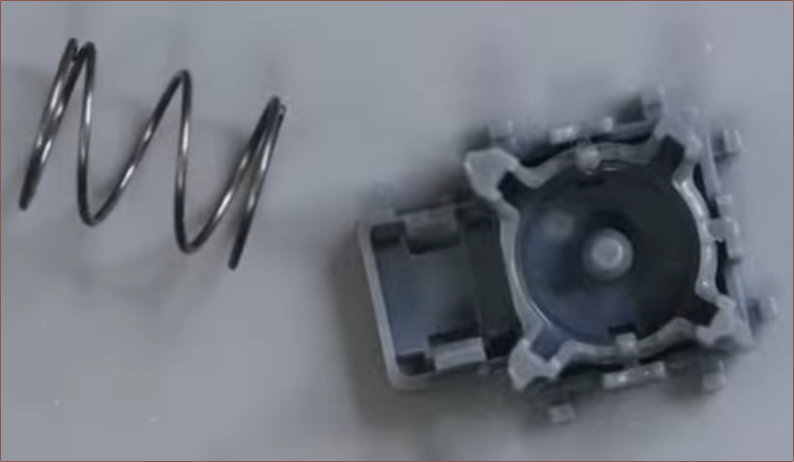
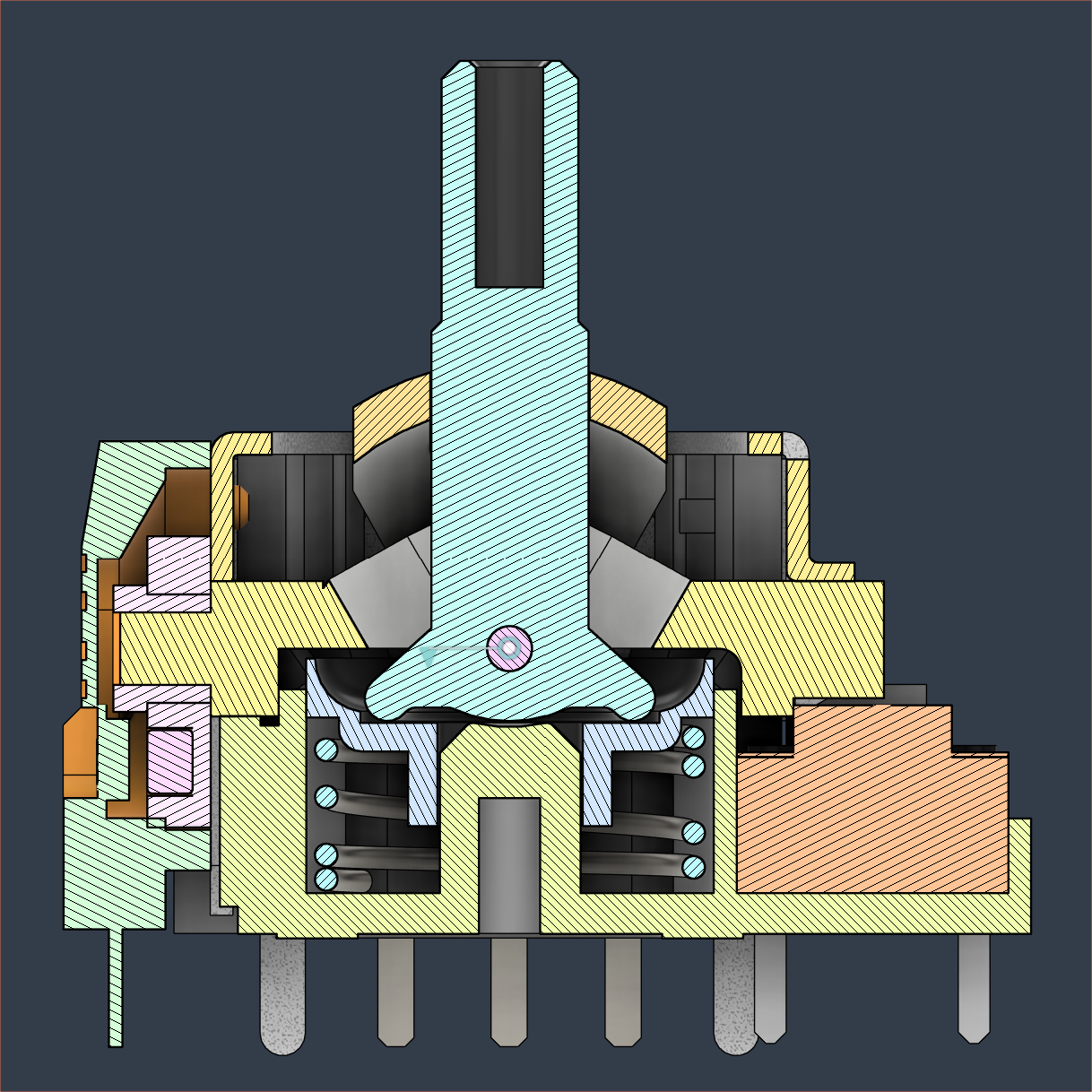
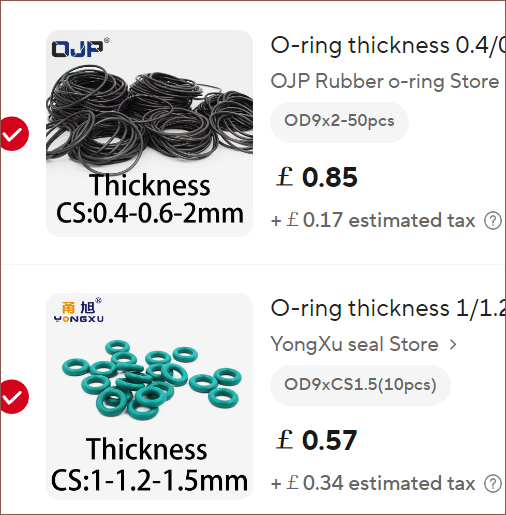
One of my first thoughts was to replace the spring with stacked O-rings. there's about 3-4mm of vertical height but, due to that middle cylinder in the base, only a 2mm diameter o-ring or smaller would fit. This would suggest either a 2mm and 1.5mm, 2 sets of 2mm or 2 sets of 1.5mm rings stacked on each other.
However, I had suspicions that the ESP32-S2 ADC's would be able to detect the much smaller range of motion, so I looked into springs. The spring constant depends on a few factors, and since the original spring is 0.5mm wire diameter and 8.6mm outer diameter, I was able to calculate the expected stiffness increase of an 8mm OD spring with wire diameter of:
- 0.7mm = approx 3X stiffness increase
- 0.8mm = approx 5X stiffness increase
I then found this video showing that the Ginfull Hall Effect joysticks have 60gf of force, which is lower than the standard of 80gf.
This would mean that 0.7mm = 180gf and 0.8mm = 300gf. After much hopping back and forth, I've decided that using 0.7mm springs are more likely to work, or perhaps I should say that both share the same list of "reasons it might fail" but 0.8mm has additional reasons. One of them is that a 5X increase might be too much for the components in the joystick to handle.

12 bit LED ring and ambient light sensor
My original idea for lighting was to have LEDs inside the keywells and they'd glow like a sci-fi prop. However, I thought it would be more useful to have some sort of "display" instead.

With a 12b ring, 5 LEDs could be on the left/right and shine a different colour depending on the chord of its respective keywell. This would act as a display for my peripheral vision, should be visible in daylight and allows brighter LEDs without drawing too much current from the host. I've also got ideas for sci-fi-esque animations, like a slow loading circle when it's idle.
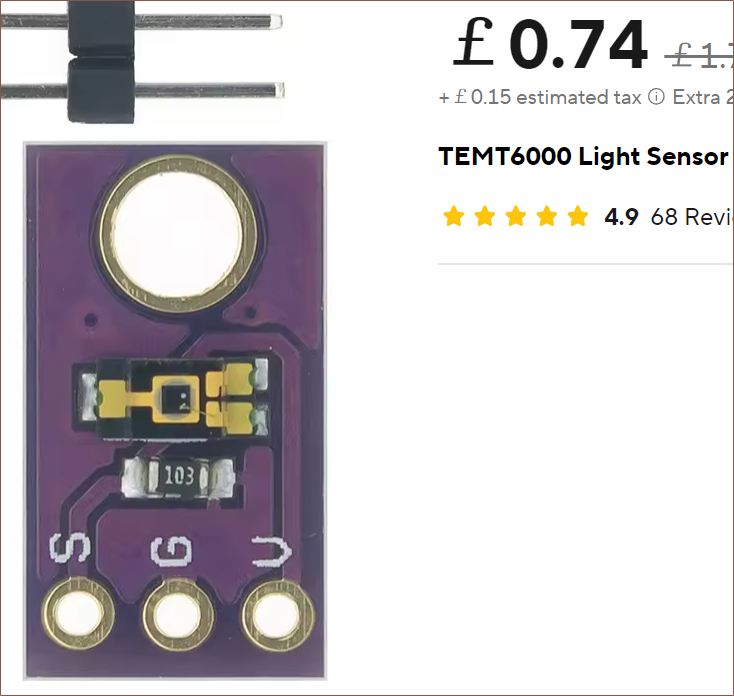
Since Tetizmol is likely to be used in a range of ambient conditions (sunny day to midnight coding) and I remember just how eye-stabbing the bright LEDs under the WK-50 encoder were to my peripheral vision, I'm going to try connecting the LED ring to one of the strapping pins so that the above TEMT6000 light sensor can be read via GPIO18. Another idea is to put this sensor on GPIO17, along with all rest of the ADC-in pins, and use GPIO18 as DAC-out.
1/4-20 Wood Inserts
I've never been keen on heat inserts since I need to use my soldering iron to insert them and make sure they're straight. One day, I found out that the Charachorder CC2 CAD files were on Github and so I was able to see the insert they used:
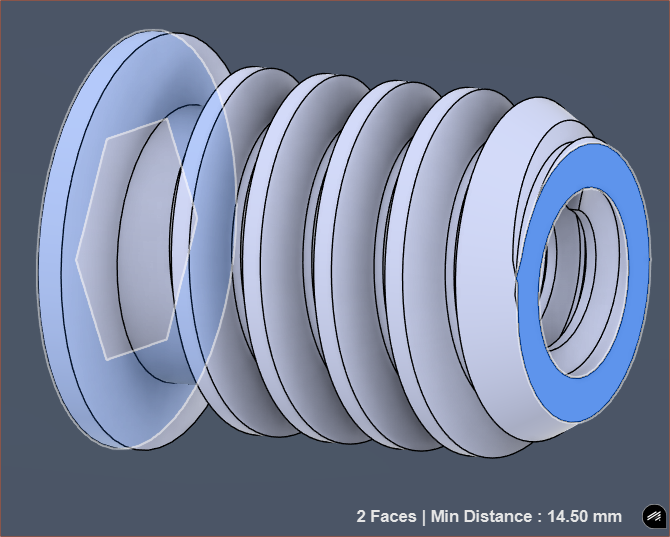
Well these ones specifically seem to only be available as a pack of 50 for £8 on AliExpress. However, I found these zinc wood inserts:

I wasn't too sure about them, but I then found this video:
A commentor mentioned that having the flange on the rear side of the intended thread is the strongest configuration, unlike what was tested in the video (for both rivets and these zinc wood inserts).
It turns out that I have every allen key size except 6mm, so I've put that in my basket too.
Super clamps and magic arms
Ignoring that the names of these products sound like Superman V Dr Strange, the mounting solution is quite important.
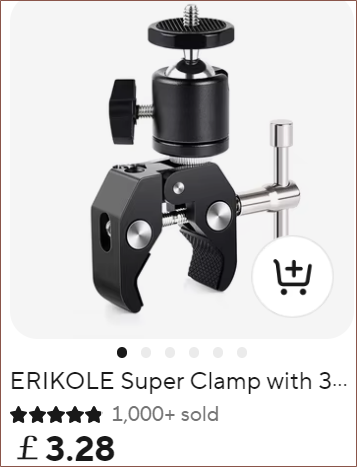
My first idea was to use the clamp above since it looked like it'll work on both desks and tubes. I went out to measure one of the bike racks and the diameter was 48mm. My desk is 30mm, but I'm not there all the time, instead working on a 5mm glass worktop saver on my bed.
Then I remembered that there will be twisting forces that will pose to try and unscrew the camera mount threads, thus I'd need at least 2 threaded inserts and 2 clamps.
I continued my research and found the below video that compared two clamps and arms, and something I took note was that a non-smooth ball joint would fix in place better.
After some hours and many tabs of research later, I've found a promising solution:
The first thing I found was the clamp, which is quite ideal as it seems that it would work with glass panes as well as tubing, and it has a copious amount of 1/4" thread locations:

There are very few clamps that have those side mount options, which allows for mounting like (below) but I can have an arm on each side weather it's mounted to a desk or vertical pole, meaning that I shouldn't need 2 separate clamps:


I have to be mindful of the mounting angles into the clamp or else I run the risk of the arm untightening if I apply specific force vectors to the 6-axis joysticks. This is why it's nice that 2 threads are at 45 degrees (in the vertical pole orientation) because if I used the 2 threads neighbouring the single 3/8" tapped hole, the arm might loosen if I pulled Tetizmol left/right:
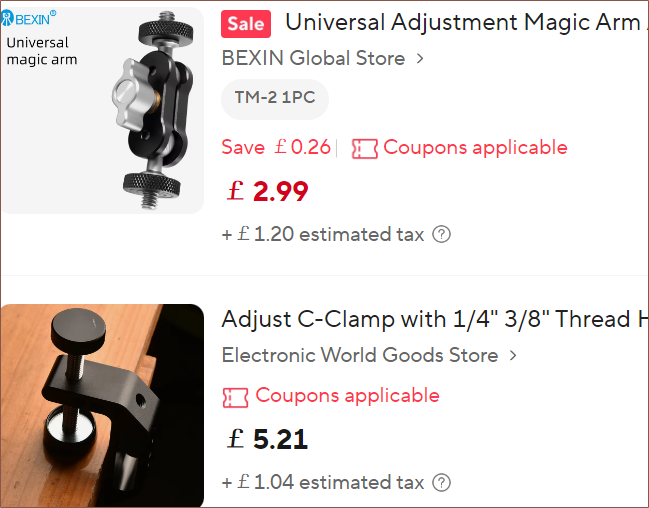
The BEXIN TM-2 magic arm I found has the grooves I'm looking for:
 It's seemingly all made of metal too, thus seems like it'll be a nicely built product. I'm expecting that the threaded inserts would be placed either side of the ESP32-S2 so I don't think they need to be particularly long.
It's seemingly all made of metal too, thus seems like it'll be a nicely built product. I'm expecting that the threaded inserts would be placed either side of the ESP32-S2 so I don't think they need to be particularly long.For twice the price, the same manufacturer has the TM-5 which should be even more likely to stay in place since the grippy face cannot twist:

Additionally, it opts to used a rubberised ring on the balls, further decreasing the likeliness that it'll move around due to manipulating the 6 axis joysticks. The TM-5 has a 6kg load bearing compared to 2kg for the TM-2.
Trivia
This log took 90 mins to write for some reason.
I'm also considering taking inspiration from the Tackle keyboard, which is uses straps to mount a keyboard to one's chest:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.