Mark Dammer MM0DQM
Mark Dammer MM0DQM-
STS-Pilot goes SANIC and UV4L
05/26/2019 at 14:50 • 0 commentsLong time no see!
Here comes a new app called "app_sanic.py" that uses the SANIC framework instead of flask. This app works with both Python3 and PyPy3, but not Python2. Videostreaming is now provided via the UV4L video driver/streaming server. UV4L must be installed separately. The default UV4L stream settings (Port 8080, /stream/video.mjpeg) are used to embed the video into the STS-Pilot web UI. This app was developed for increased video performance (UV4L) and better resource usage (PyPy3).
Check the GitHub repo for more details.
-
Client program for Joystick and Gamepad support
04/25/2017 at 19:04 • 0 commentsI have added the "client" folder to the github repo. This folder will contain example client programs to control or communicate with STS-PiLot from another computer.
The first program joystick.py allows you to control your STS-Pi or other two wheeler running STS-PiLot with a joystick or gamepad.
![]()
-
PiWifiCam: Use your Raspberry Pi as a simple IP camera
04/22/2017 at 11:57 • 0 commentsI have created a "video only" version of STS-Pilot that allows a Raspberry Pi to be used as a simple IP camera: PiWifiCam
-
Bugfix: No more caching problems on some (mobile) browsers
04/22/2017 at 11:53 • 0 commentsSome (mainly mobile) web browsers did not update the video when the slower, single threaded video interface was used. This was caused by the browser caching the jpeg image instead of reloading it. The problem is now solved.
-
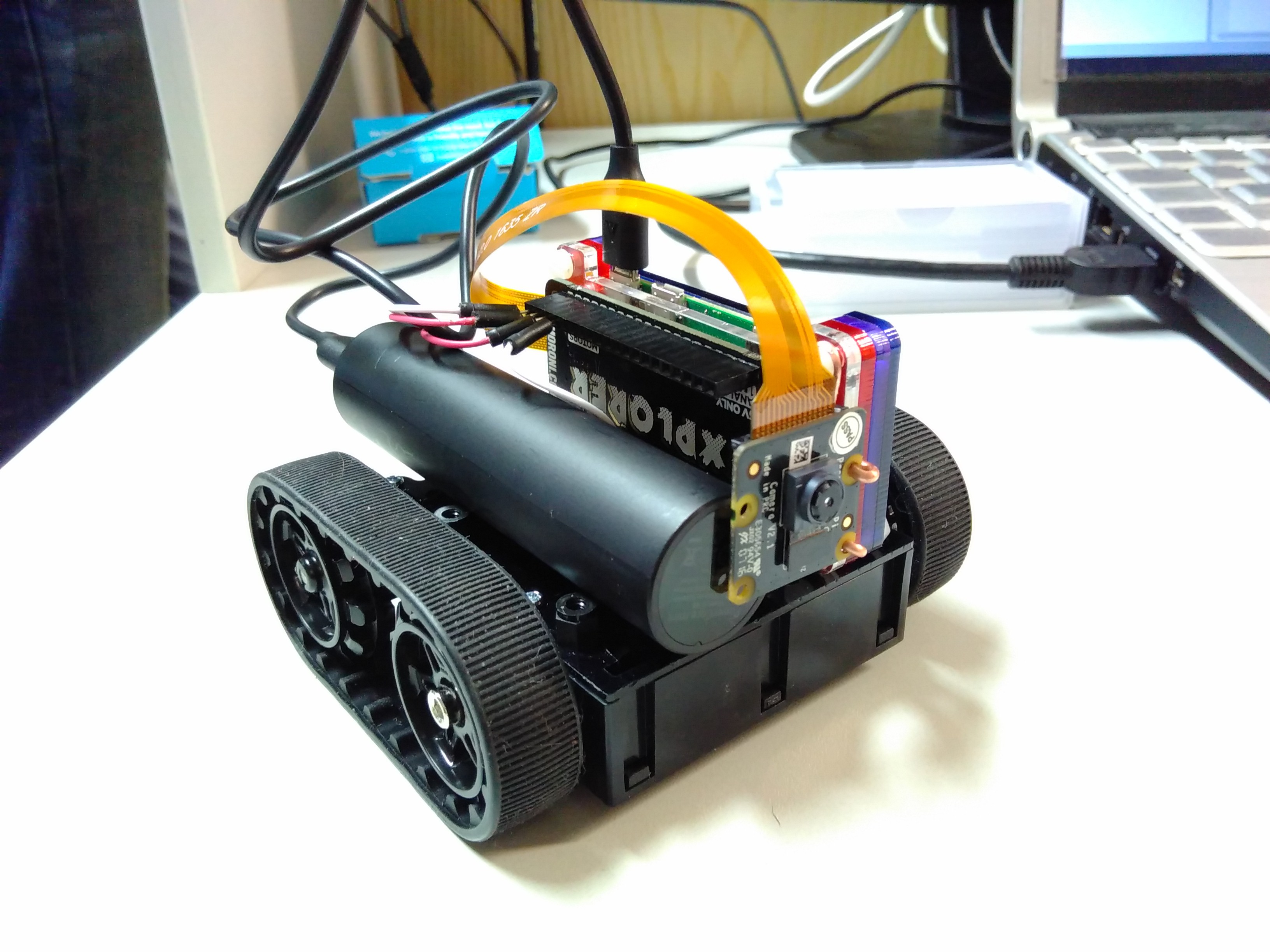
Live video from Pi Zero (W) with non-threaded video capture
03/24/2017 at 12:10 • 0 comments![Pi Zero W with camera and Explorer pHAT]()
It is now possible to run STS-PiLot on a Pi Zero (W) with live video. The latest software version contains an additional non-threaded video feed that puts less strain on systems with lower CPU specs.
Use the following URL syntax to use it:
http://[your pi's ip]:5000/?video=[msecs]
[msecs] sets the minimum delay between frame captures in milliseconds. Example:
http://192.168.1.23:5000/?video=100 will provide a video display with about 10 frames per second.How does it work:
http://[your pi's ip]:5000/single_frame.jpg provides a single JPEG frame on every call to the URL.
The javascript program that runs within your browser calls this URL every [msecs].
This functionality is available in both the Pi Camera and the OpenCV generic camera interface.
You still get the threaded, high framerate, low latency, higher CPU interface when using the base URL without arguments: http://[your pi's ip]:5000
And this is the Polulu ZUMO chassis featuring a Pi Zero W with live camera feed and Explorer pHAT that had its first public appearance at Moray Coder Dojo yesterday:
![]()
-
io_wrapper.py and io_wrapper_dummy.py
03/15/2017 at 21:20 • 0 commentsAll native Explorer HAT calls have been moved to io_wrapper.py. This makes adapting the program for other hardware easier.
io_wrapper_dummy.py uses no specific hardware at all and can be used for testing and playing around on any Linux computer. Instead of interacting with hardware calls to the motors and outputs are logged to STDOUT. The dummy "inputs" just return random numbers or logic levels that are displayed on the HUD overlay.
-
Generic Webcam support via OpenCV
03/15/2017 at 21:17 • 0 commentsI have added a file camera_cv.py. This module uses OpenCV to connect any V4L compatible camera (like webcams) to STS-PiLot.
-
Successful tests with Pi Zero W
03/06/2017 at 10:33 • 0 commentsI have done some successful tests with the new Pi Zero W and the Explorer pHAT interface over the weekend.
All works well and despite the missing LEDs and touchpads the Explorer pHAT works out of the box without any needs to modify the software.
Still waiting for the Pi Zero camera to arrive this week :-)
-
Successful tests with Pi Zero W
03/06/2017 at 10:32 • 0 commentsI have done some successful tests with the new Pi Zero W and the Explorer pHAT interface.
All works well and despite the missing LEDs and touchpads the Explorer pHAT works out of the box without any needs to modify the software.
Still waiting for the Pi Zero camera to arrive this week :-)
STS-PiLot Robotics Remote Control
Remote control web interface with live video for Raspberry Pi Robots