 Julian Millan
Julian MillanIn recent years, advancements in hardware and software have made wearable robotic technology more feasible today than ever. This subfield of robotics could provide a variety of services ranging from medical to industrial. By experimenting and prototyping this technology, we can advance human-robot interaction (HRI).
Many modern robotics today are not wearable and thus limited in what they can achieve since they either lack the intelligence or manipulation skills to do critical tasks effectively. Wearable robotics solves these problems. However, designing safe and effective robotics presents many challenges. There needs to be a secure way to wear the technology that doesn’t put the user in danger. It is also critical to design secure algorithms that won’t reach dangerous edge cases. Getting these problems right could allow the technology to assist in fields where human strength alone is insufficient.
Goals:
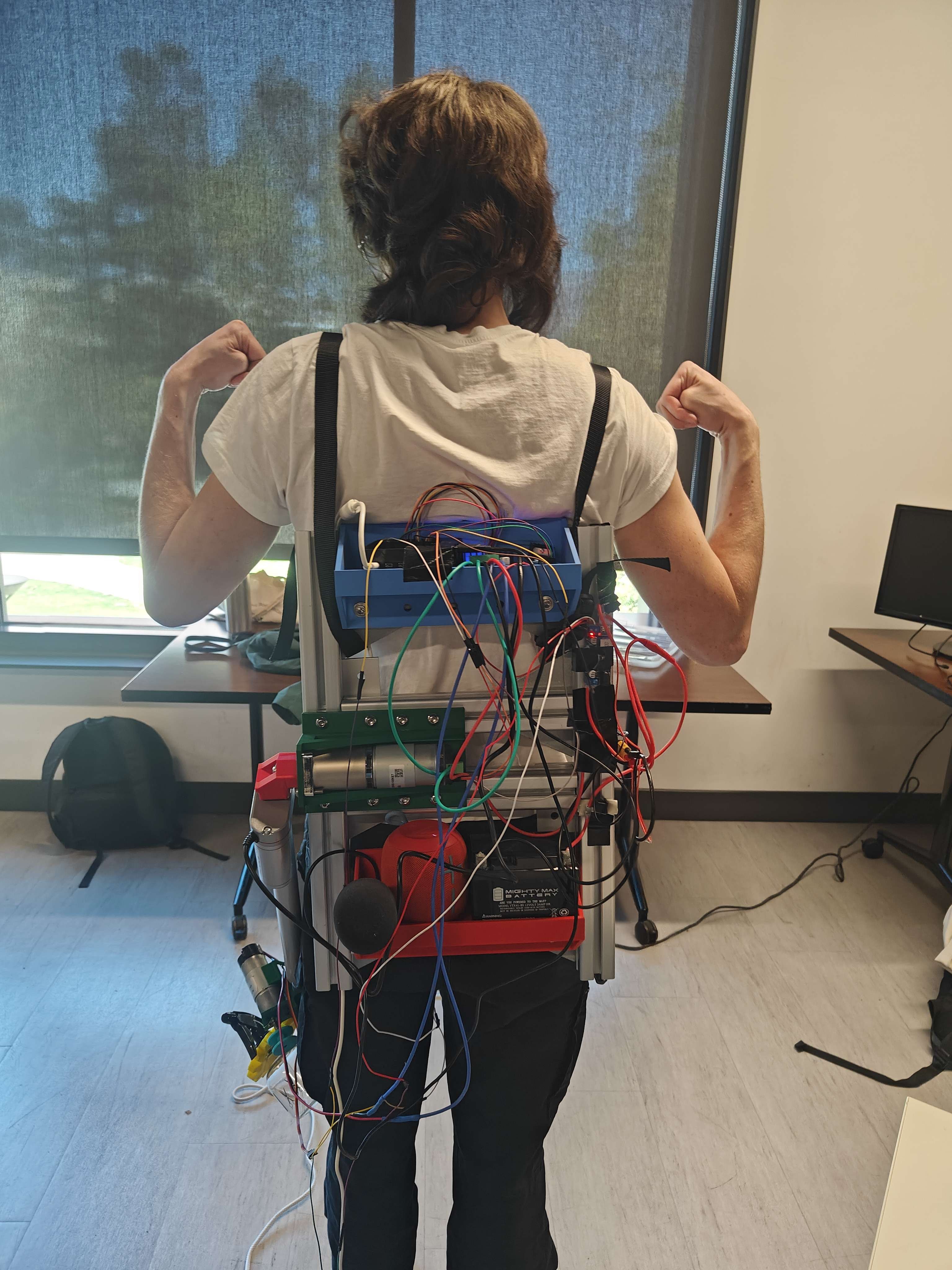
- Design and fabrication of a back-mounted frame to hold electronics and mount the arms
- For this term, we want just one functioning arm
- We want to be able to use remote control to test capabilities of the arm.
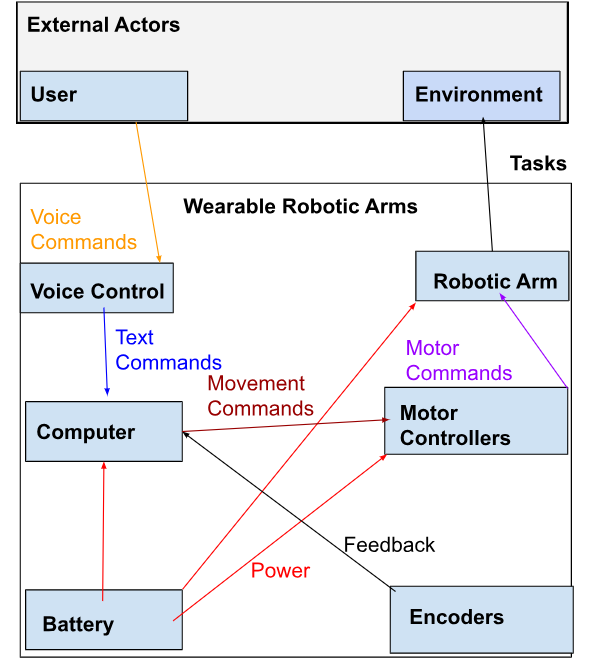
- We then want to integrate a Raspberry Pi and Robot Operating Software to control the arms
- We want to then integrate voice control so that the user can control the third arm while using the other two on the main task
- Ideally we incorporate some human-robot interaction as well.
Non-Goals:
- Any sort of exoskeleton limb enhancement, we want another set of fully robotic limbs, not to enhance the limbs of the user.
- Combative or other dangerous capabilities. The tasks of the robot should be simple and safe.
- Consumer-friendly robotics. The goal isn’t to simplify the design down enough for the average person, all users should be trained and educated on how the design works.


 Sinclair Gurny
Sinclair Gurny
 therobotstudio
therobotstudio

 lasllamasvuelan
lasllamasvuelan