Julian Millan
Julian Millan-
First Full Test
03/16/2025 at 05:06 • 0 commentsJARVIS now has full mechanical and electrical assembly, and can do basic versions of the ideal functions. These include voice control, testing of all joints, a responsive voice, a PID controller, and basic gripping capability. A seated demonstration is attached.

-
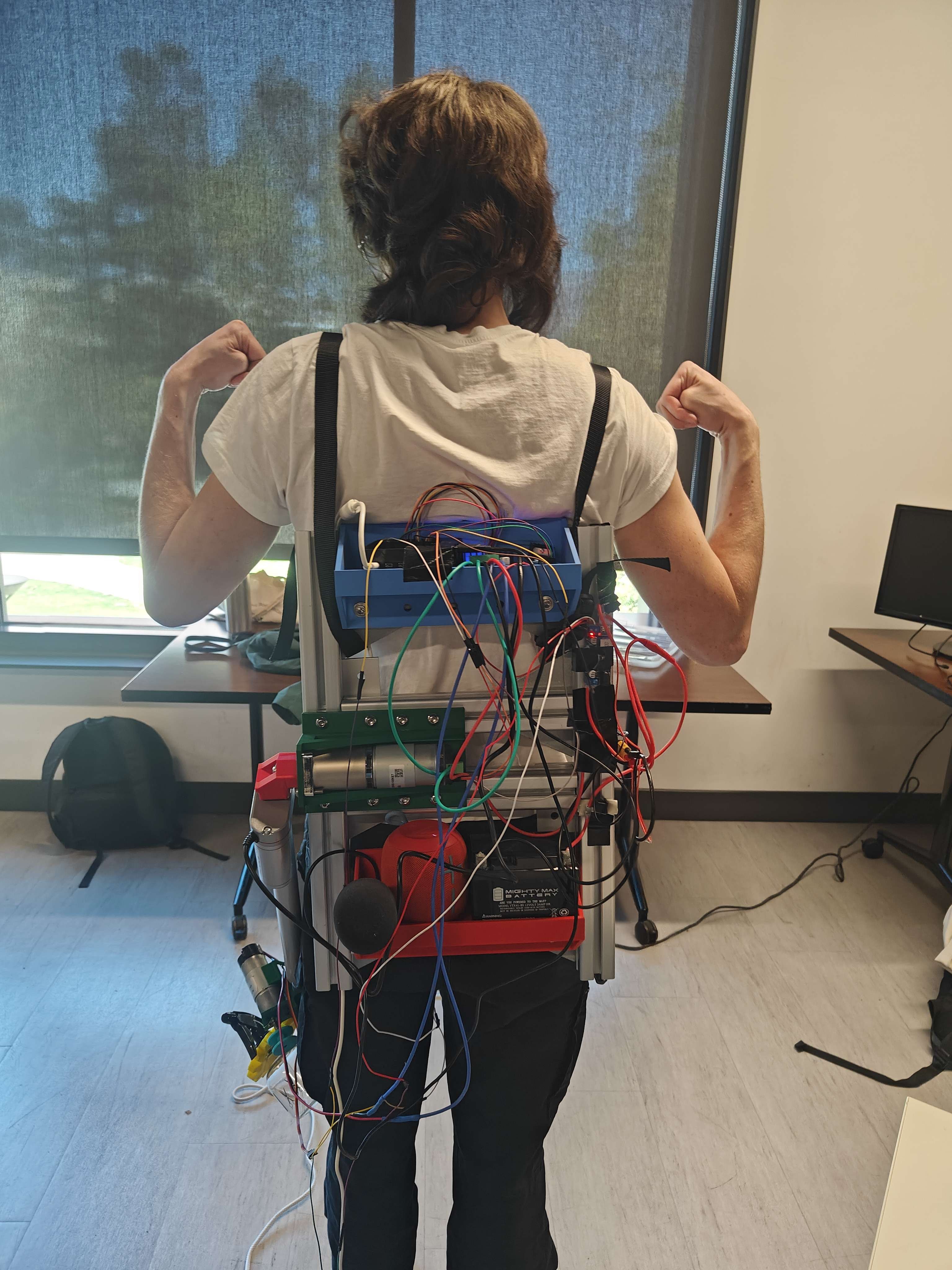
Full Mechanical Assembly
02/18/2025 at 14:54 • 0 commentsBarring movement testing, the entire frame and actuation design of the robot is fully designed and fabricated. A couple 3D printed parts could be iteratively improved, such as the end effector spool or the hexagonal shoulder joint. The next step is to integrate all of the electronics and begin testing the movement capabilities via teleop control.
-
First Update
02/01/2025 at 08:29 • 0 commentsPrinted and tested the main gripping and manipulation mechanism. I'm opting to use the novel two-string SpiRob model, demonstrated here: https://youtube.com/shorts/Lrg99CrNS8g?si=C63kN3N3QorPuuKM
Details behind the model can be found here: https://www.cell.com/device/fulltext/S2666-9986(24)00603-3?rss=yes&utm_source=dlvr.it&utm_medium=linkedin#mmc1
Full credit goes to the authors for their work on this design.
JARVIS
Julians Autonomous Robotics Voice-controlled Intelligent Sidekick