 Venus Aradhya
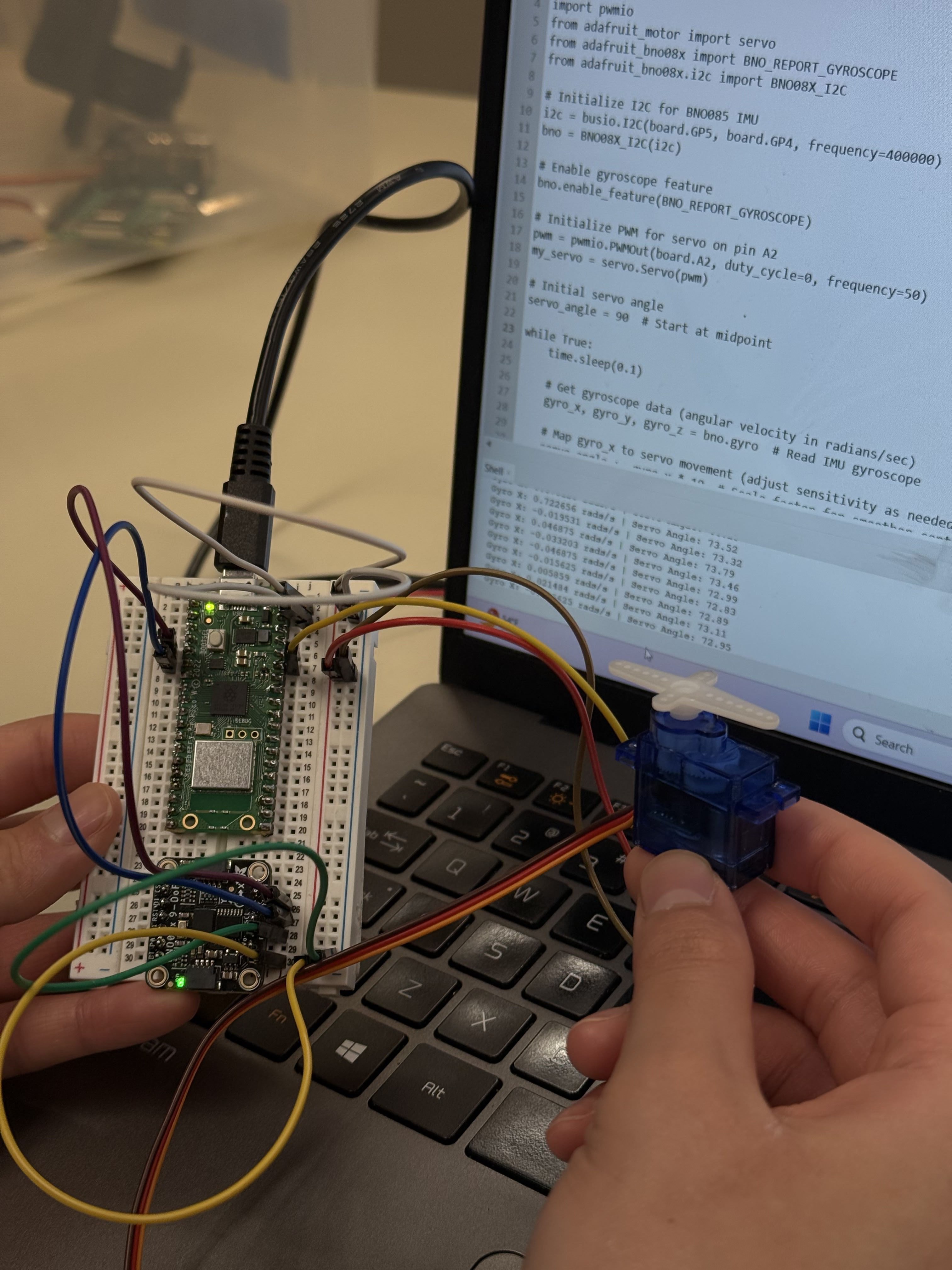
Venus AradhyaFirst big checkpoint has been reached; gyroscope & accelerometer data is being read into into Circuitpython and servos have been programmed to counterbalance motion and auto stabilize acting as gimbal
Next steps: attach raspberry pi camera to base and redesign handheld CAD structure to accommodate for new servo placement rather than the previous model
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.