 L-anc
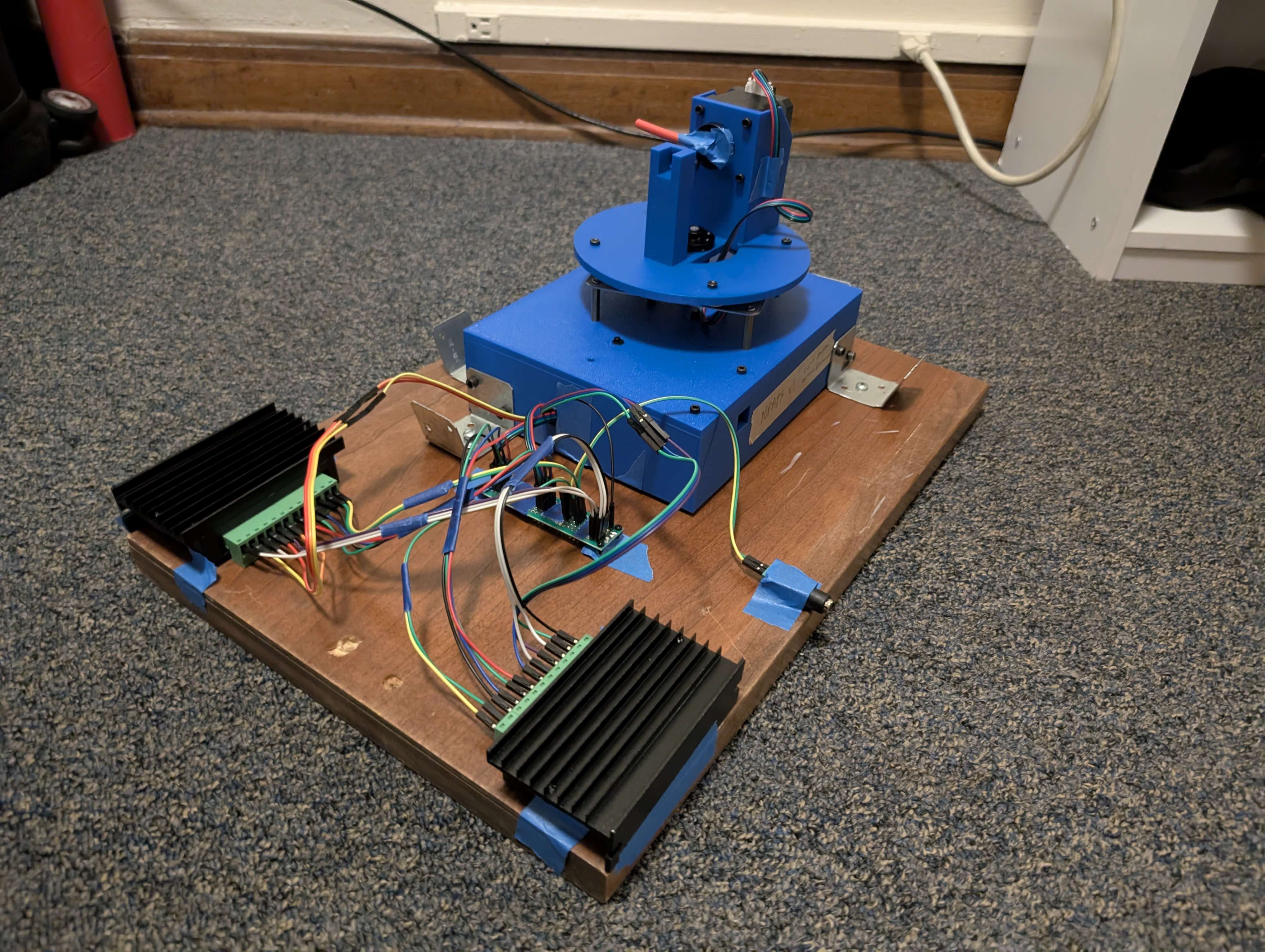
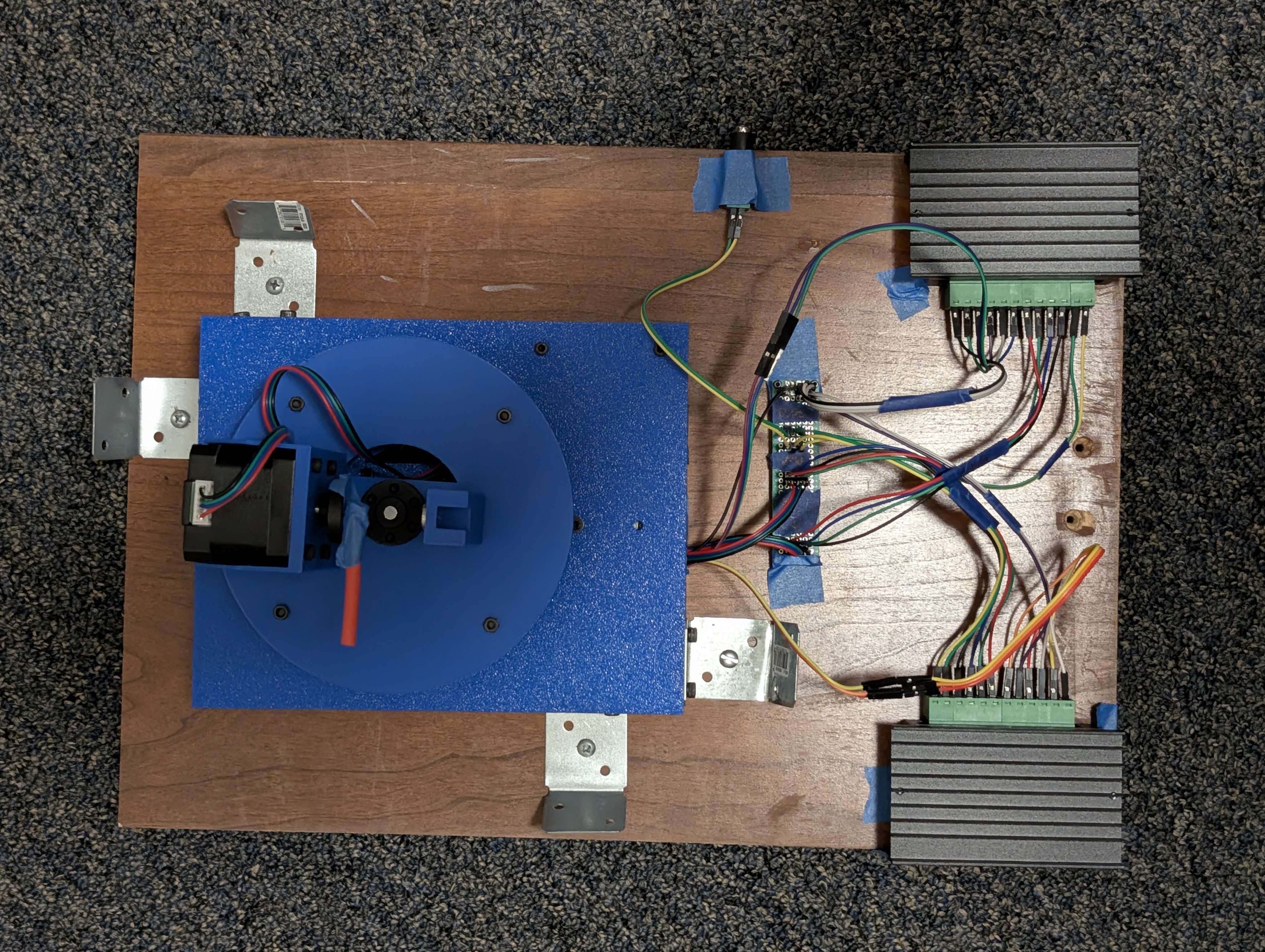
L-ancBuilt prototype test-bed with components:
- Arduino Uno R3
- 2x Nema 17 stepper motors
- 2x TB6600 stepper motor drivers
- custom built circuit board
Working with MPAPS_movement.ino test code that implements degree based aiming commands while keeping track of origin and orientation w.r.t it.
Ran into issues driving the turntable as the lazy susan bearing requires too much spacing from the base for the NEMA 17 to directly interface with the turntable. This necessitated extending the motor shaft with a shaft collar and 5mm aluminum rod, however this proved to be unstable and would work itself loose over time.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.