 Lauri
LauriSteering system consists of steppter motor and a pushrod that will guide front axle free movement to left or right. If stepper motor is in the middle then axle can steer freely.
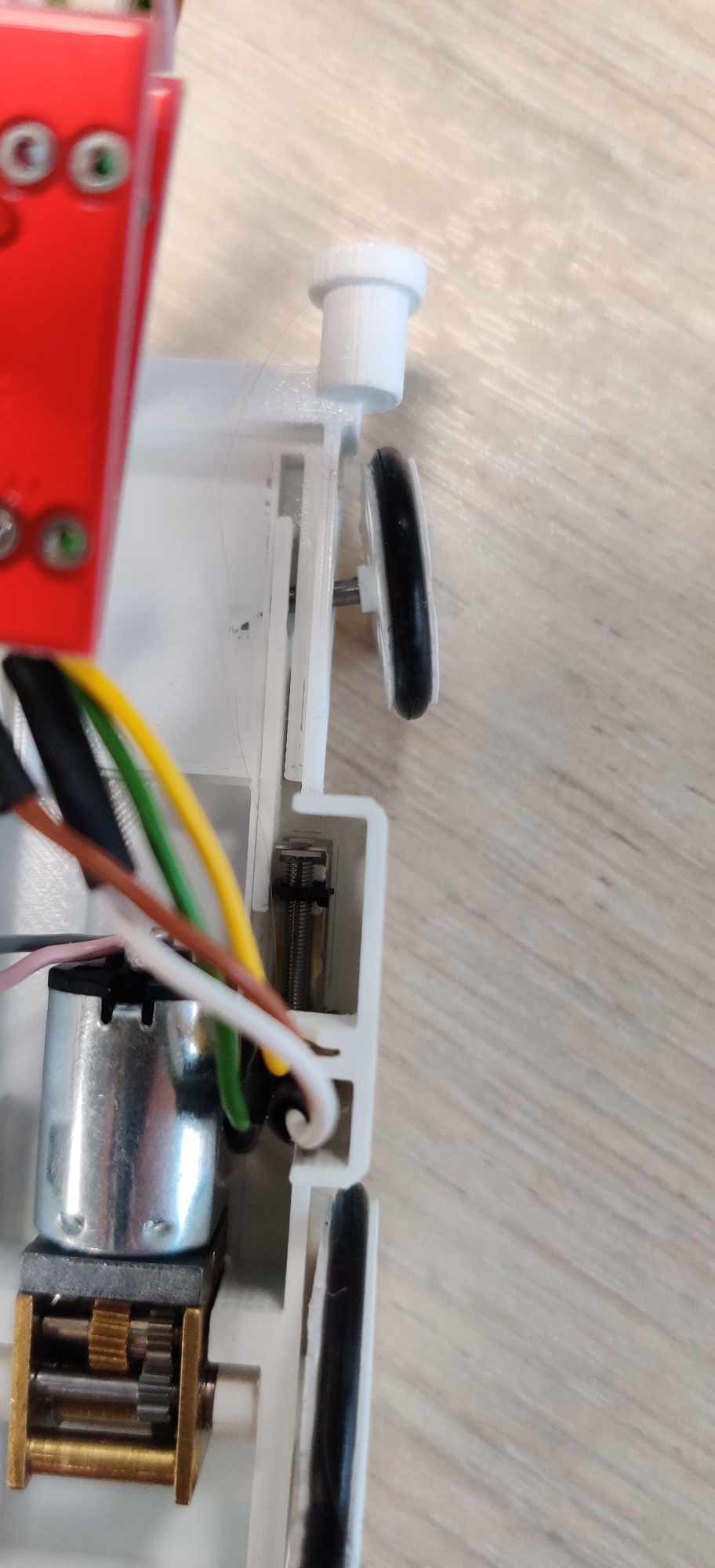
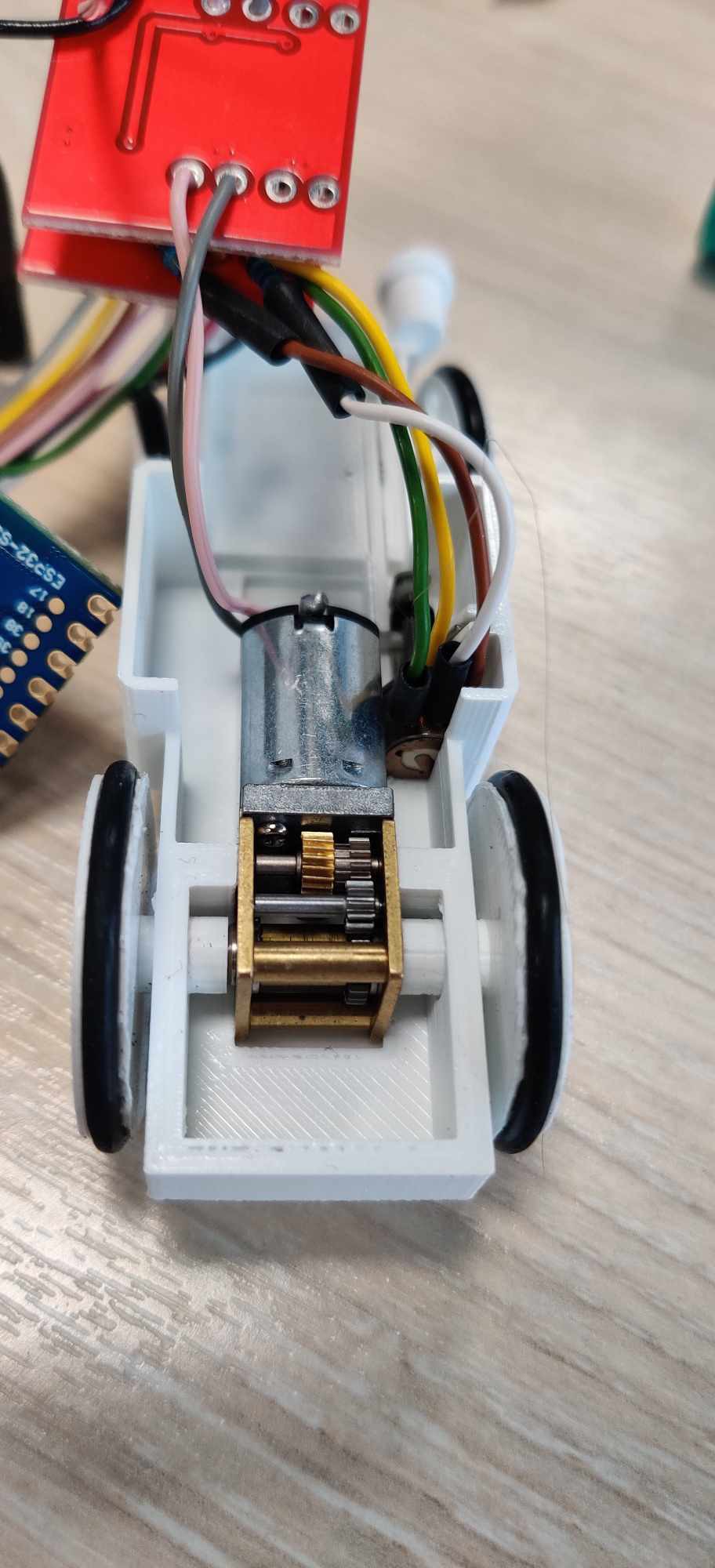
All the wheels have O-ring for the friction. Rear wheels are directly connected to the motor gearbox. Front wheels have a 1.6mm wolfram (TIG welder tungsten electrode) as an axle, that rotates freely in the slot.
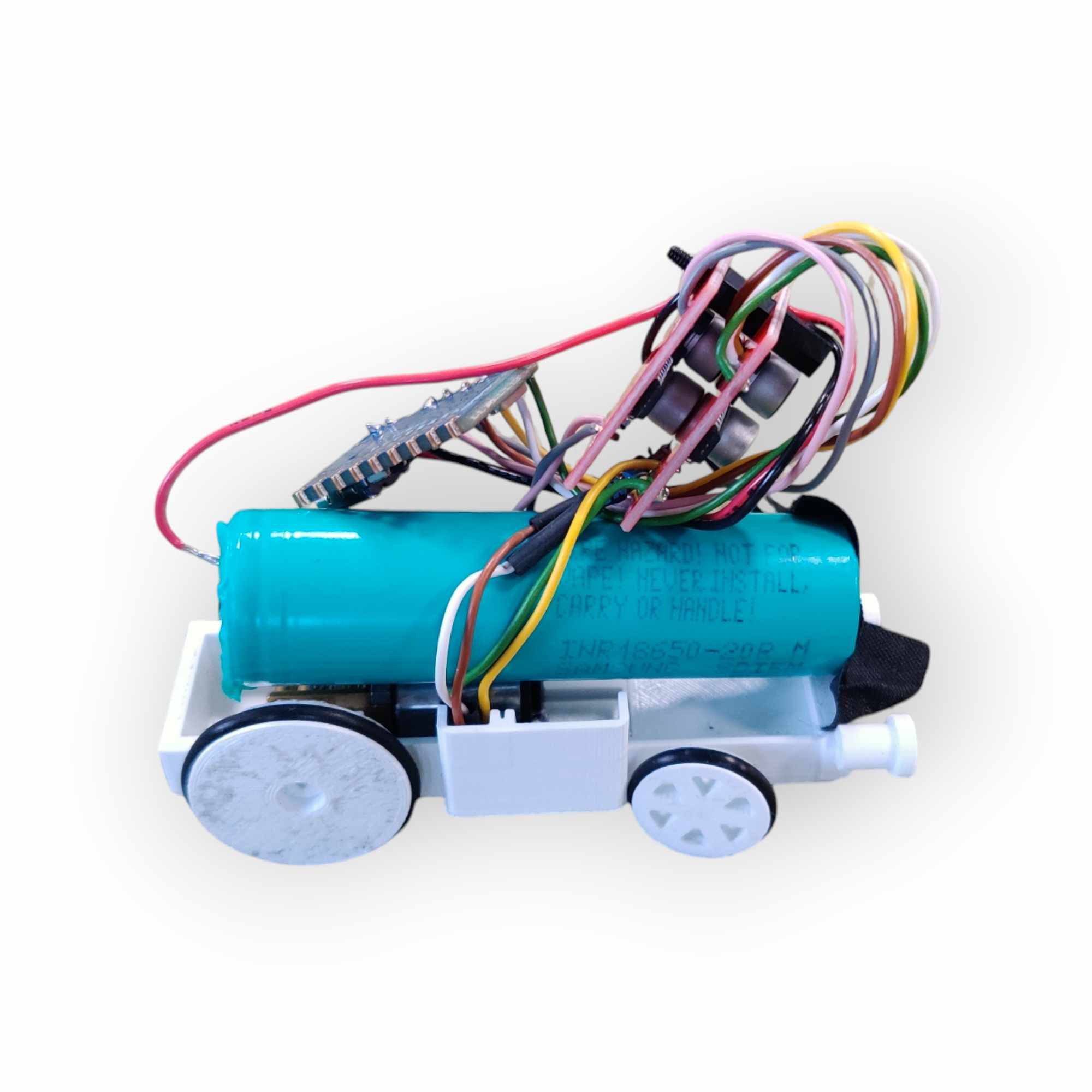
Finally, ESP32, 2 motor drivers and a battery is connected and first drive on the floor is done.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.