 Dami Kim
Dami KimFeb 16 - 22
- With the help of our mentor (Kevin), was able to control the speed of the motor properly using a potentiometer
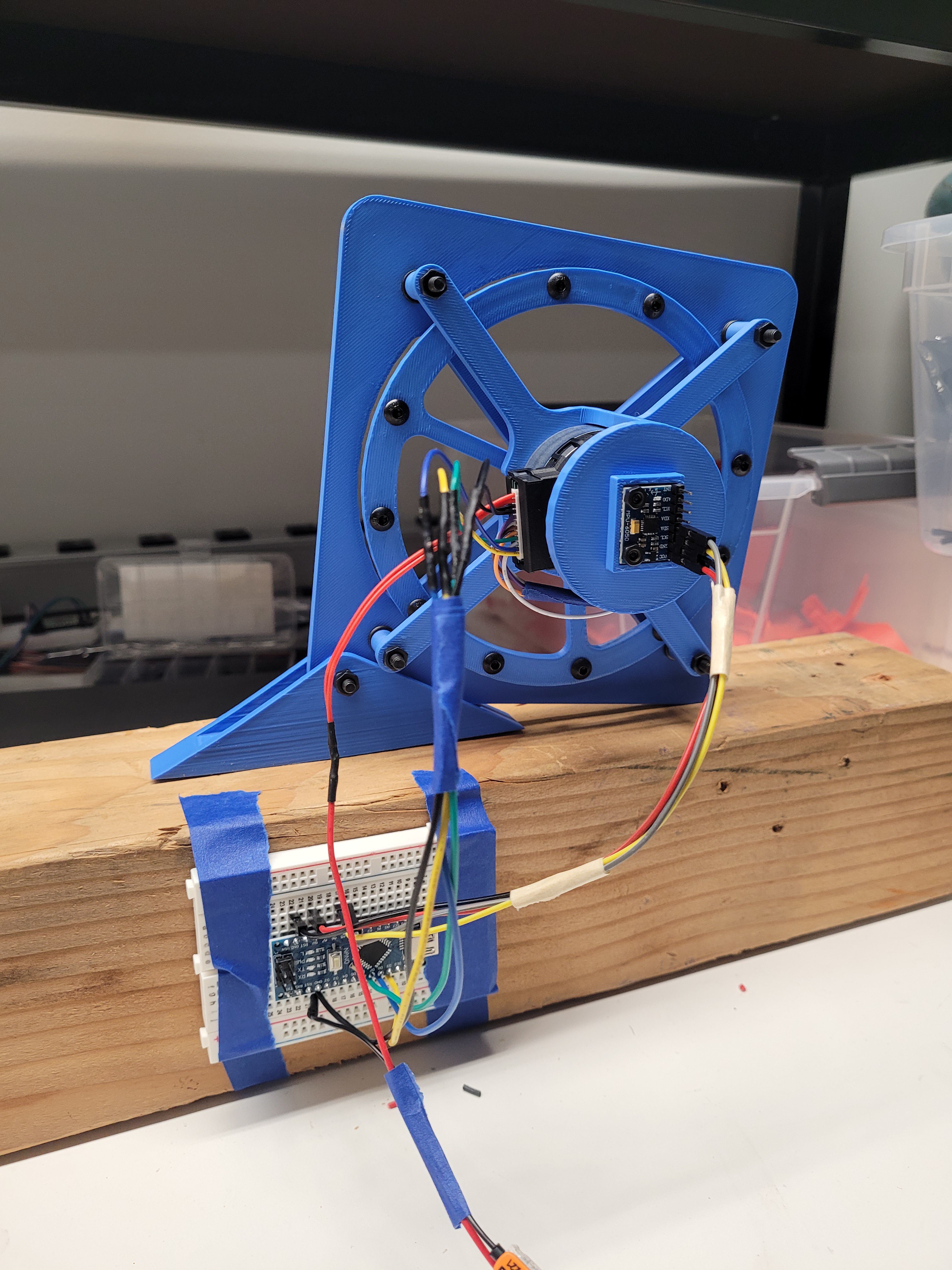
- Finished CAD design of the 6x6" 1 DoF platform that will test self balancing using one reaction wheel
- 3D printed the platform, assembled it, and secured to a heavy piece of wood block to keep it in place
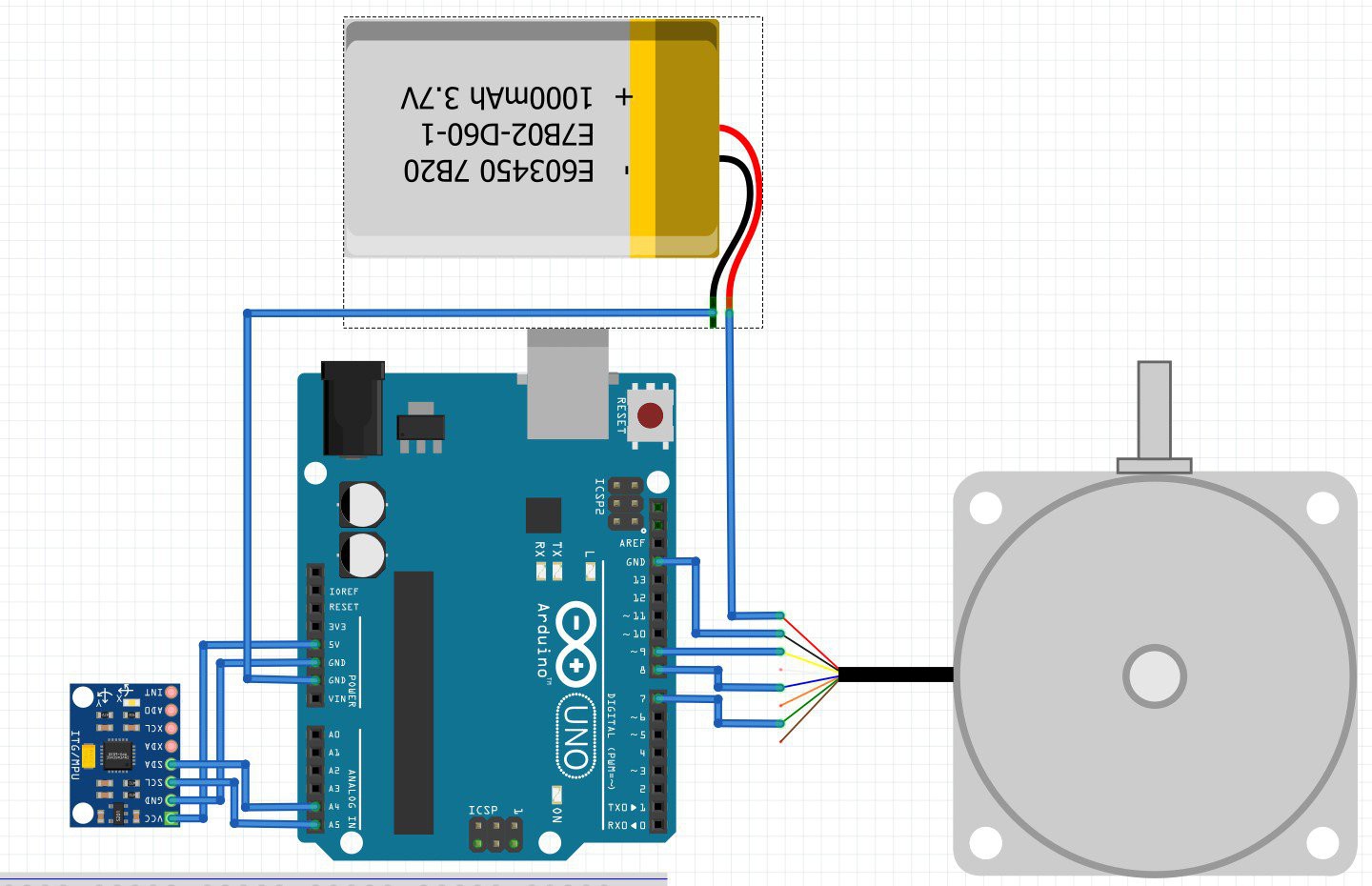
- Switched from the BNO08x IMU to the MPU6050 because the BNO took up too much memory from the Arduino Nano
- Soldered wires for extension
const int potentiometerPin = A0; // Potentiometer connected to analog pin A0
#define PWM_PIN 9 // Yellow - Speed control (PWM)
#define START_PIN 8 // Blue - Start/Stop
#define DIR_PIN 7 // Green - Direction (CW/CCW)
#define BRAKE_PIN 4 // White - Brake (GND = brake, Floating = release)
void setup() {
pinMode(START_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
pinMode(BRAKE_PIN, OUTPUT);
// Set default motor state
digitalWrite(START_PIN, HIGH); // Start motor
digitalWrite(DIR_PIN, LOW); // Default: CW rotation
digitalWrite(BRAKE_PIN, HIGH); // Release brake
Serial.begin(9600);
pinMode(9, OUTPUT); // Set pin 9 as output for tone generation
}
void loop() {
// Read the potentiometer value
int potValue = analogRead(potentiometerPin);
// Map the potentiometer value to the desired frequency range
int frequency = map(potValue, 0, 1023, 1000, 26000);
// Generate tone on pin 9
tone(PWM_PIN, frequency);
Serial.print(frequency);
Serial.println(" Hz");
}
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.