Dami Kim
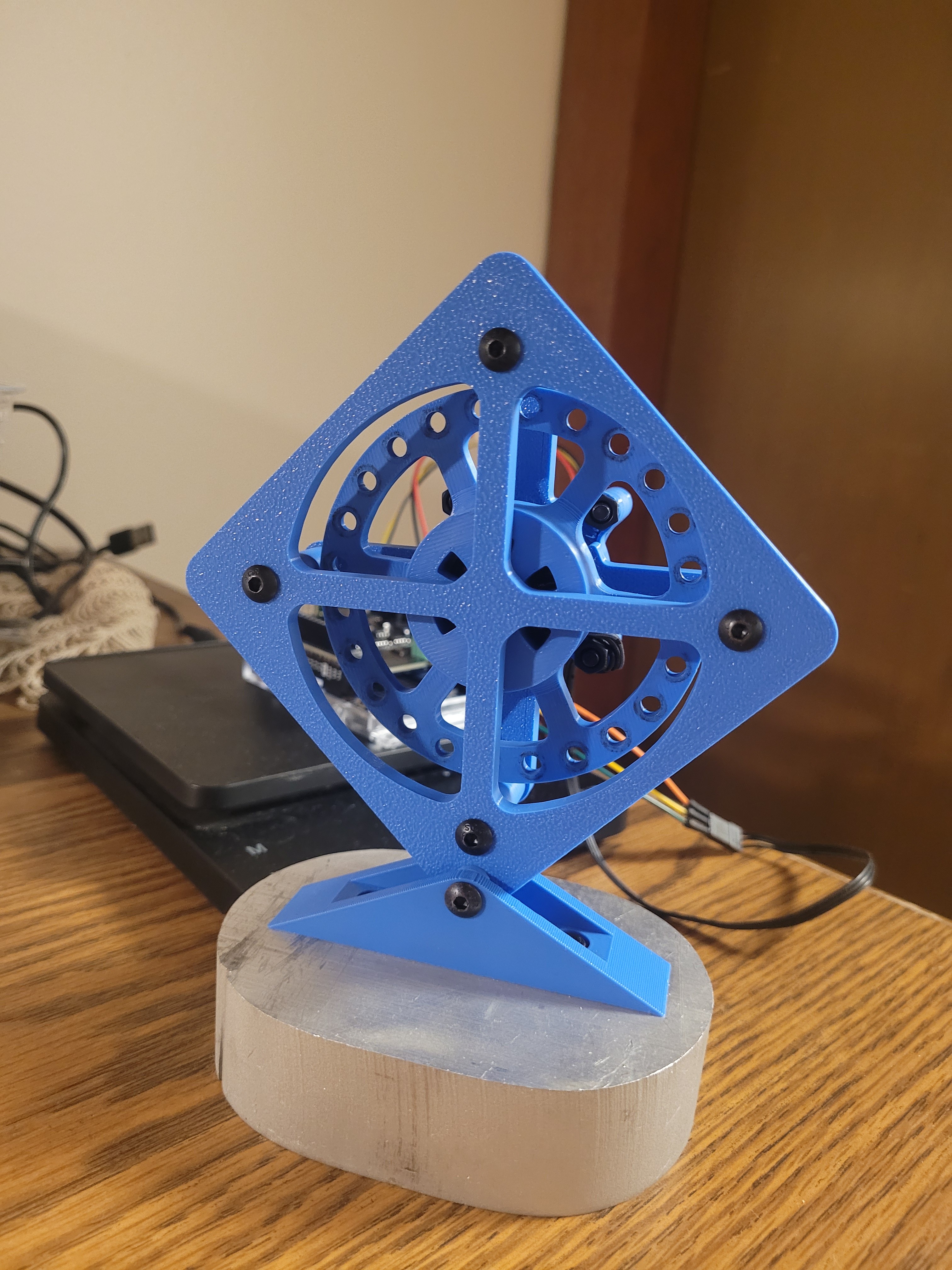
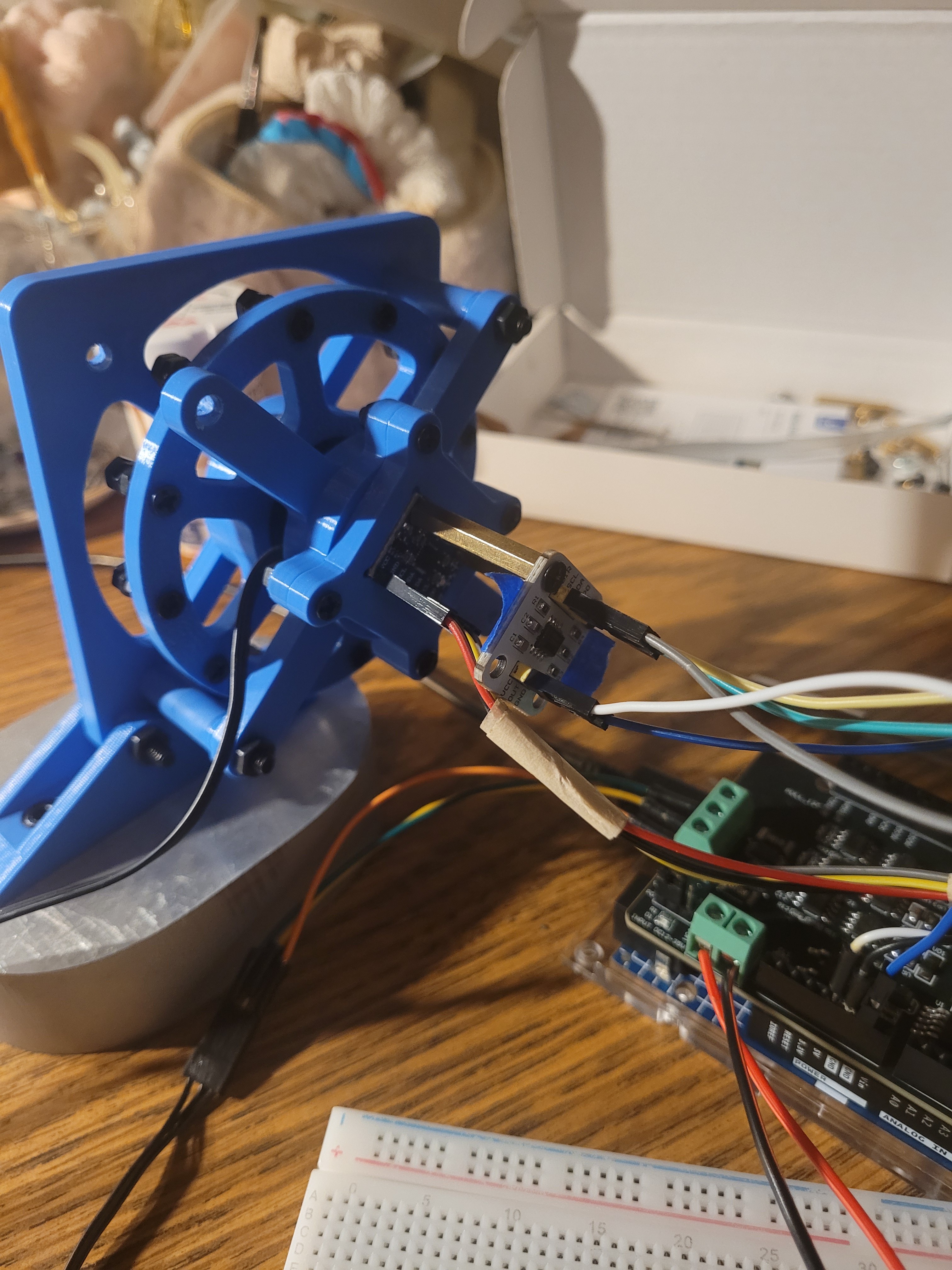
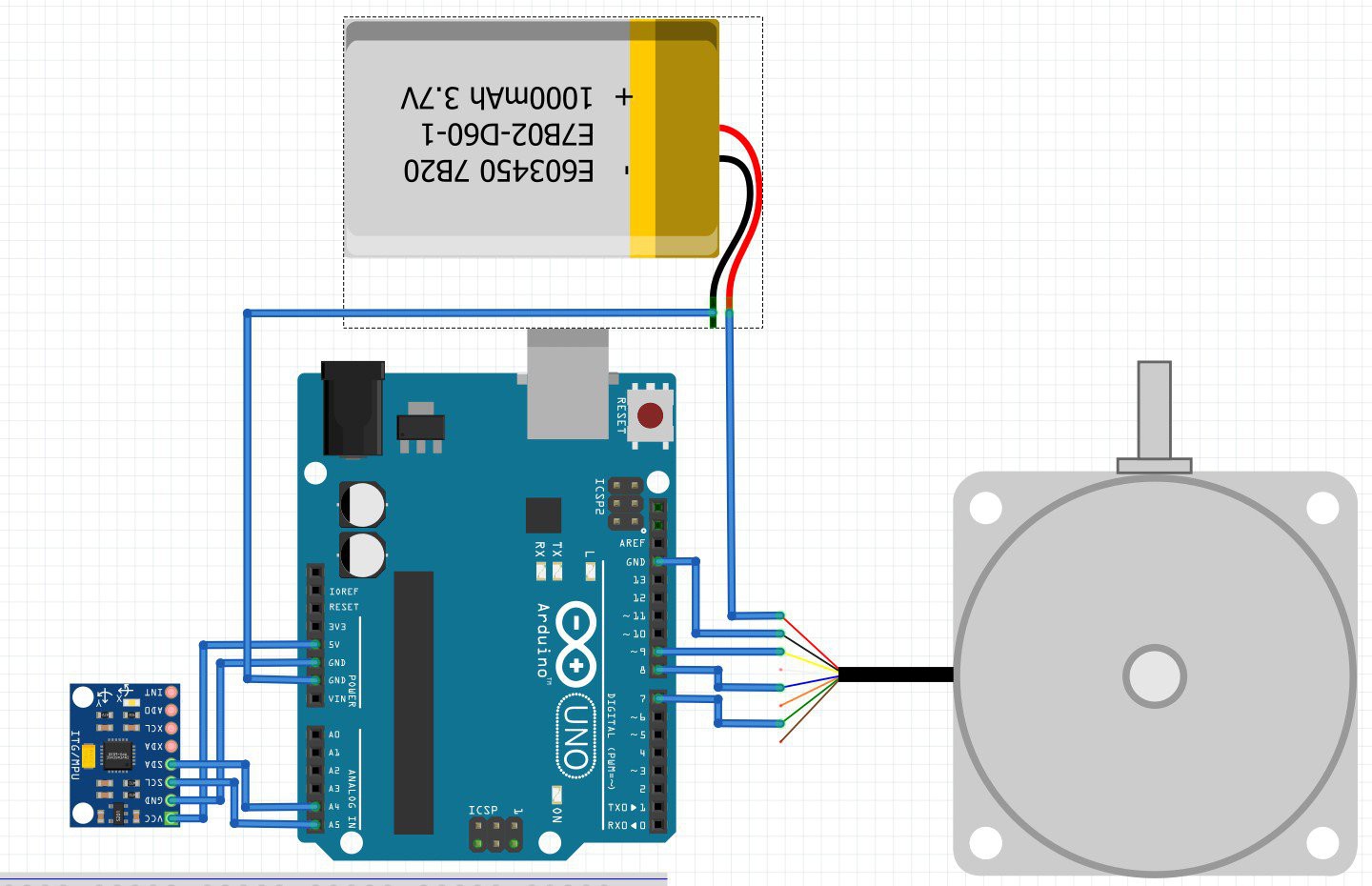
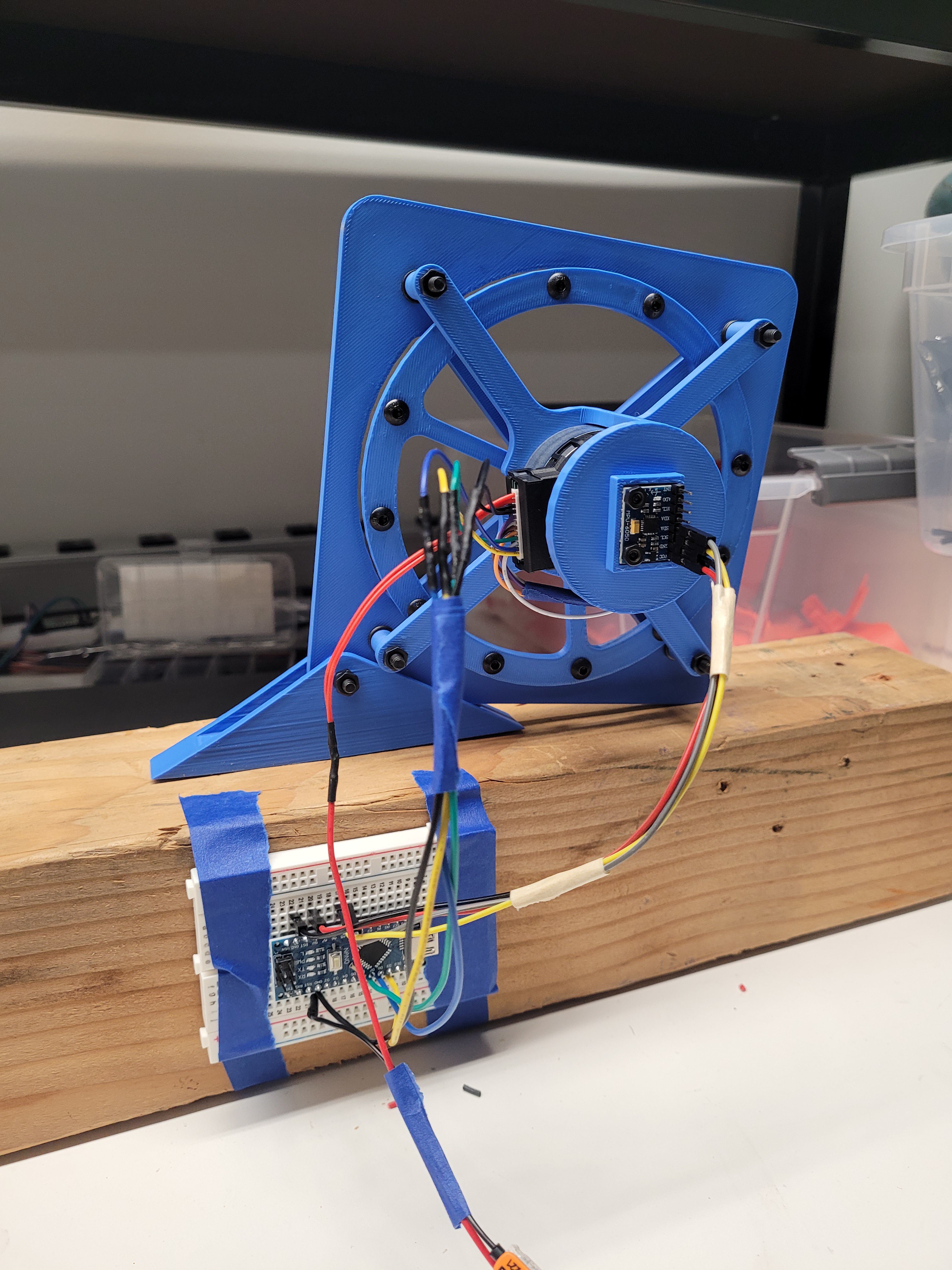
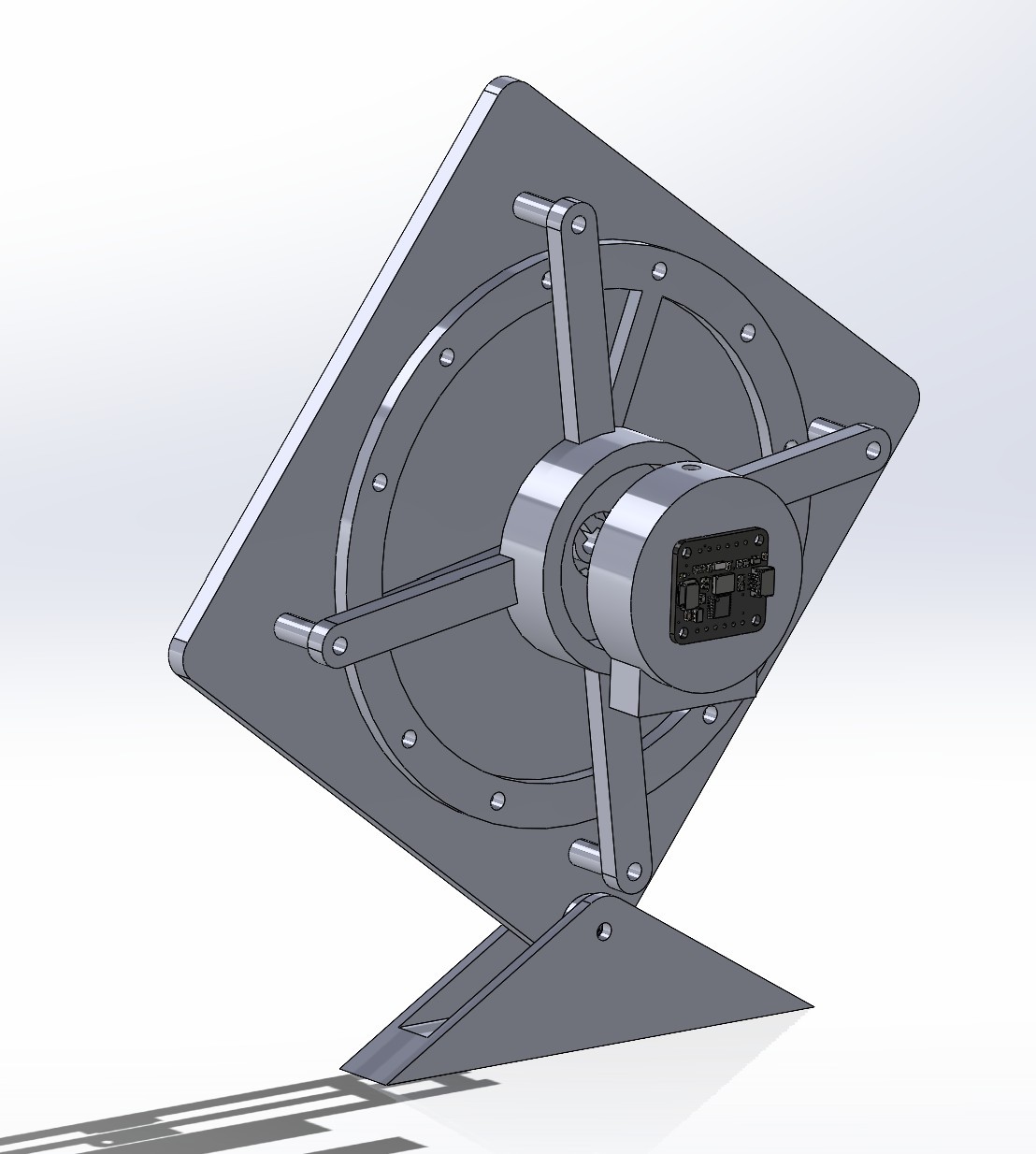
Dami KimThis project attempts to prototype a self balancing cube using reaction wheels. We are in the process of prototyping and testing a 1 DoF test bed that uses only one reaction wheel to balance. We use an IMU to calculate the tilt angle from 0° (upright) and estimate motor speed. We experiment with the reaction wheel's size and weight to provide enough torque to lift the entire platform. When the platform leans to one side, the reaction wheel spins in the opposite direction to self-balance.
0%
0%
Reaction Wheel Self Balancing Cube
This project attempts to prototype a self balancing cube using three reaction wheels
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Rob Englebright
Rob Englebright