 Dami Kim
Dami KimMar 2 - 8
- Kept having motor issues
- Decided to use new motors and change design
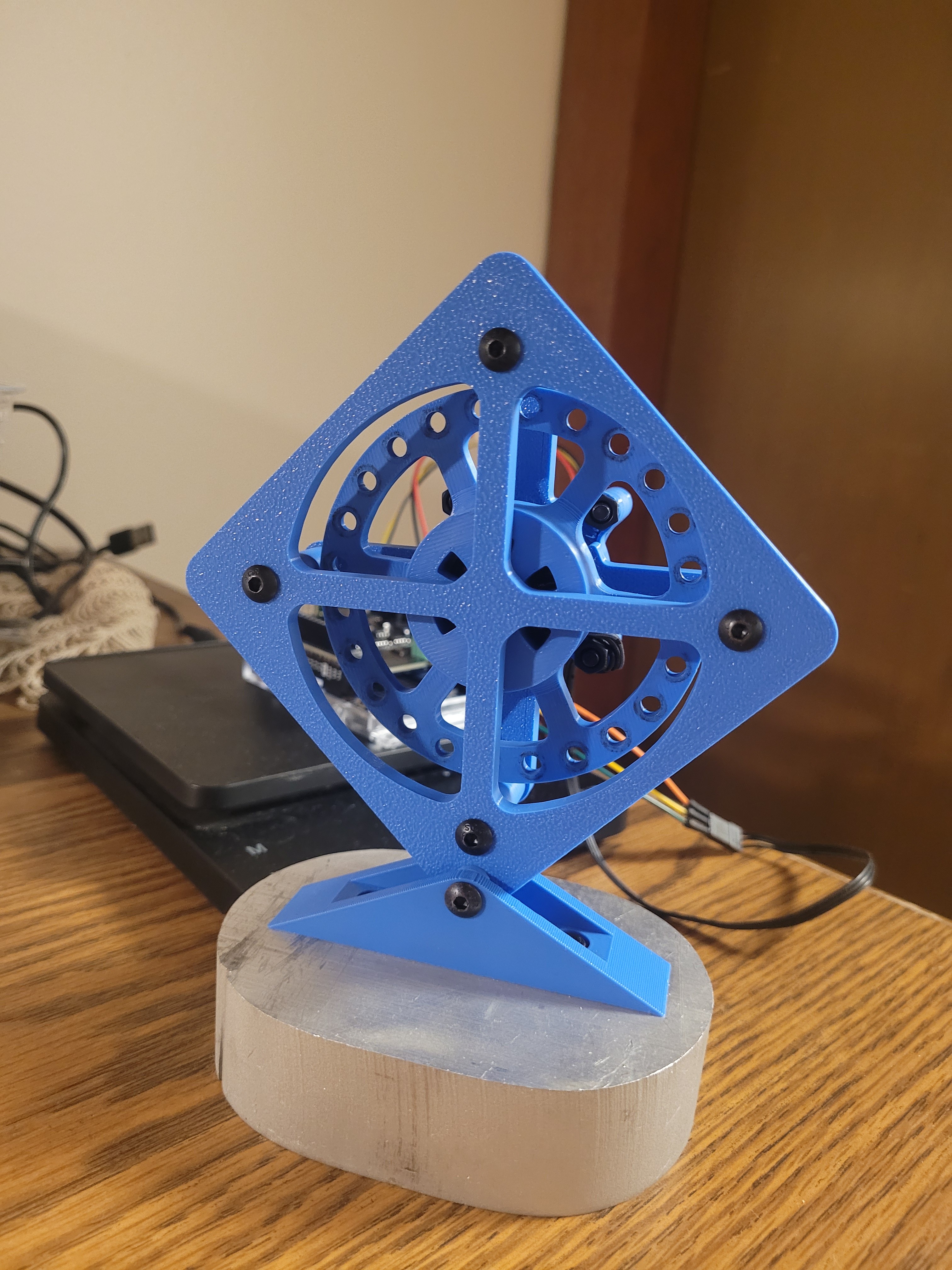
- Downscaled to 3" x 3" platform
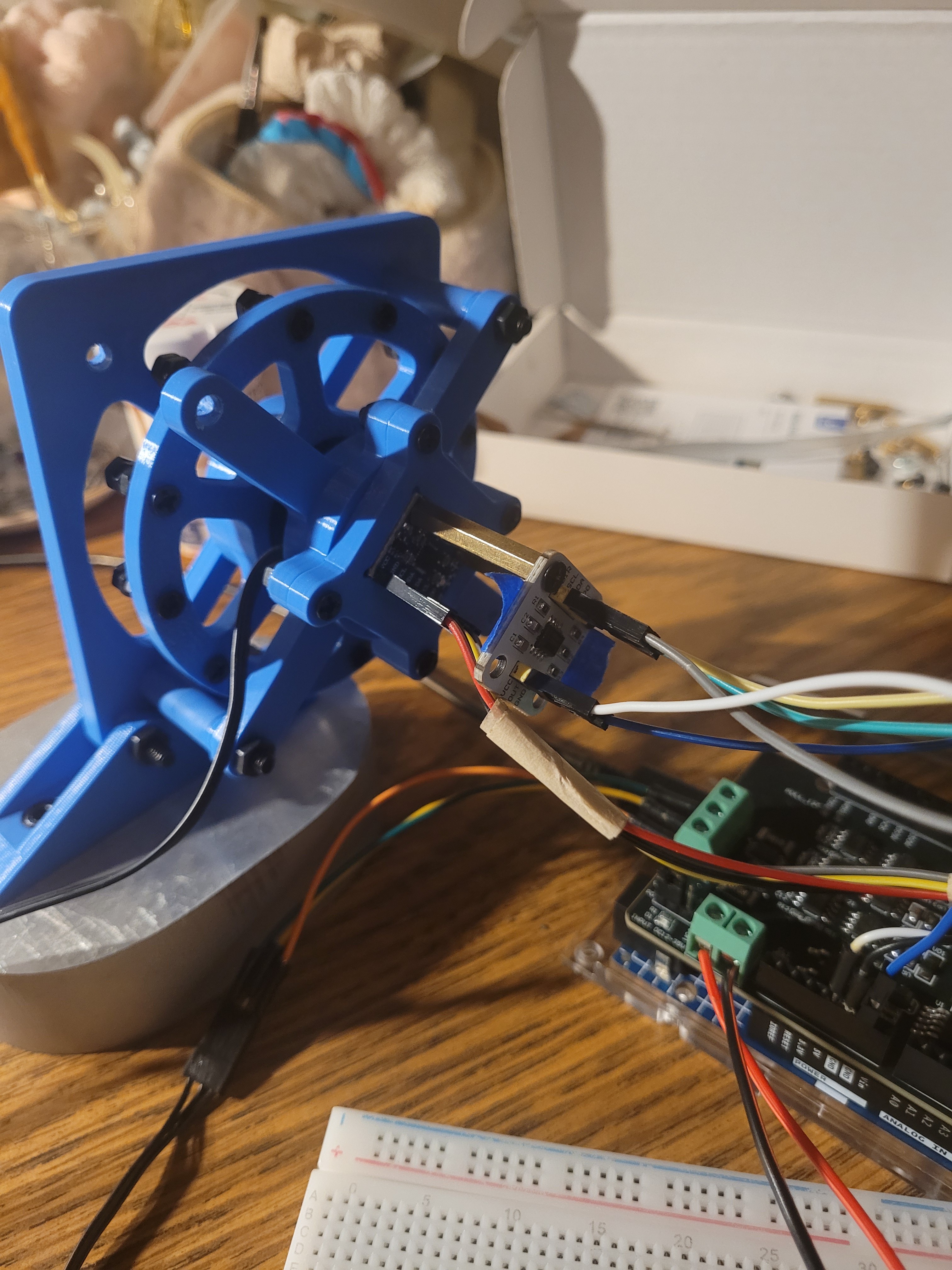
- Decided to use Arduino Uno R4 Minima, SimpleFOC motor controller shield, and 2208 90KV gimbal motor
- Reference: https://docs.simplefoc.com/bldcmotor
- CAD-ed, 3D printed, and assembled mini 1DoF testbed and secured it to a metal block
- Wanted to test out a magnetic encoder for closed loop motor control (and more reliable velocity/acceleration readings)
- Encoder turned out to be super sensitive and unreliable so we only used IMU data
- Experimented with reaction wheel mass by adding/removing M3 screws to the perimeter
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.