 Vipin M
Vipin MRefer to the README for the details.
0%
0%
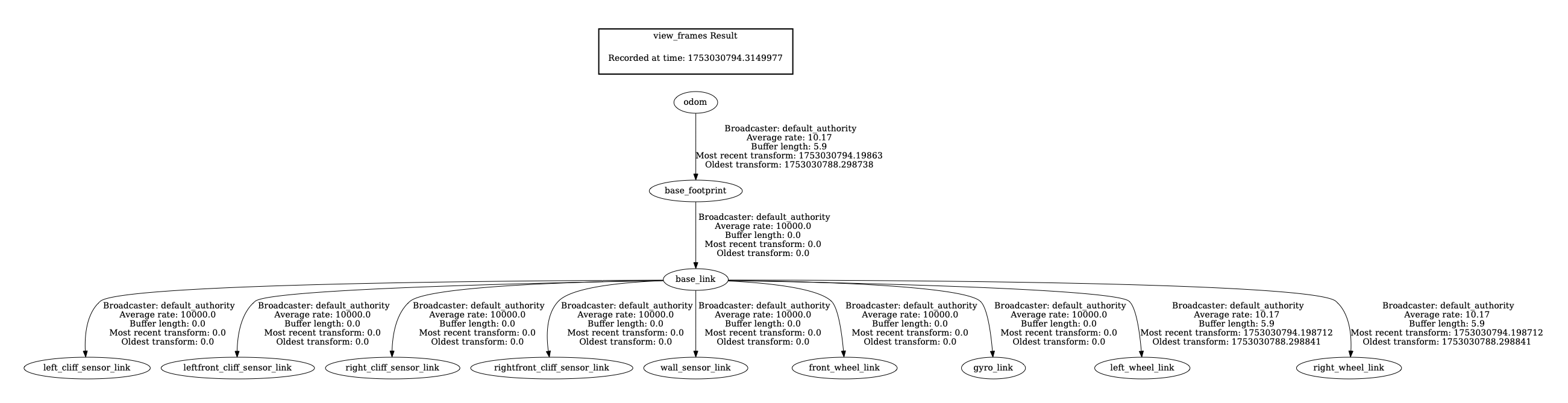
Perceptor - ROS2 Perception, Planning, Control
Modified Roomba with ROS2, LIDAR, and odometry running SLAM Toolbox for real-time mapping and navigation
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 rlsutton1
rlsutton1
 Guido
Guido
 Max.K
Max.K
 Robbie
Robbie
Cool project! I'm trying to do sensor fusion with the Roomba encoders & an MPU6050 as well.
Check it out: https://hackaday.io/project/183524-old-roomba-new-tricks
Did you accomplish this or is this something you're still working on? I'm looking for the EKF input parameters (covariance matrix).