 Kelvin Gonzalez Amador
Kelvin Gonzalez AmadorMore details of the operation:
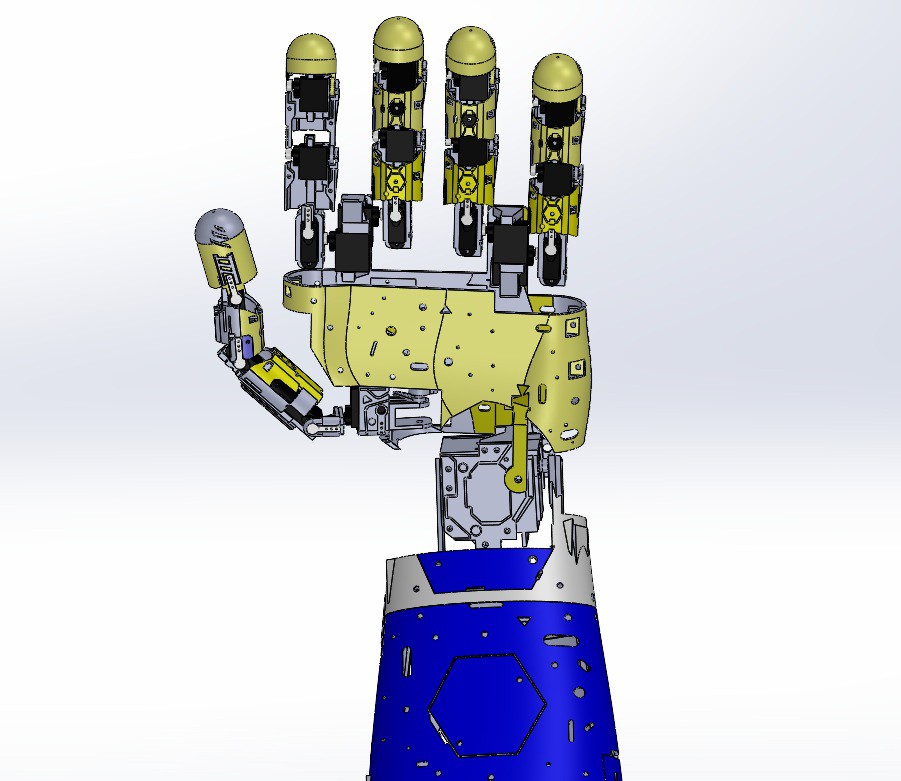
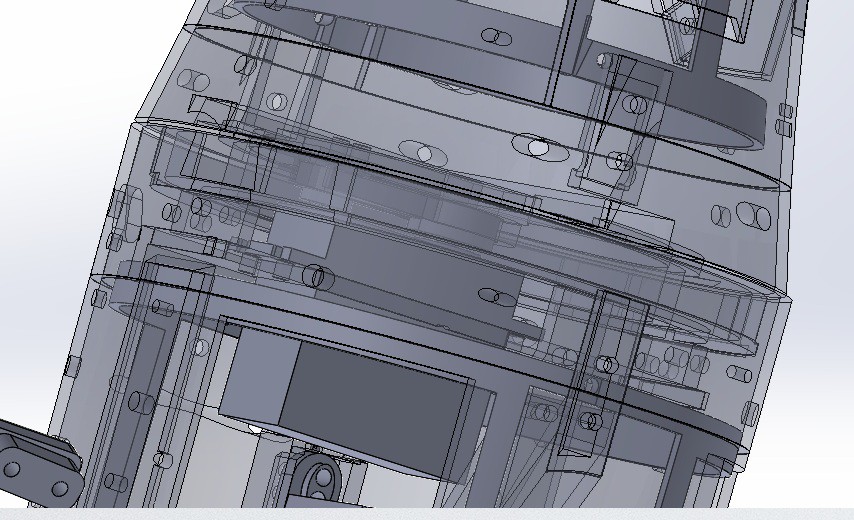
3D CAD design done in SolidWorks. The design was designed to allow a wide range of motion for the fingers and hand.
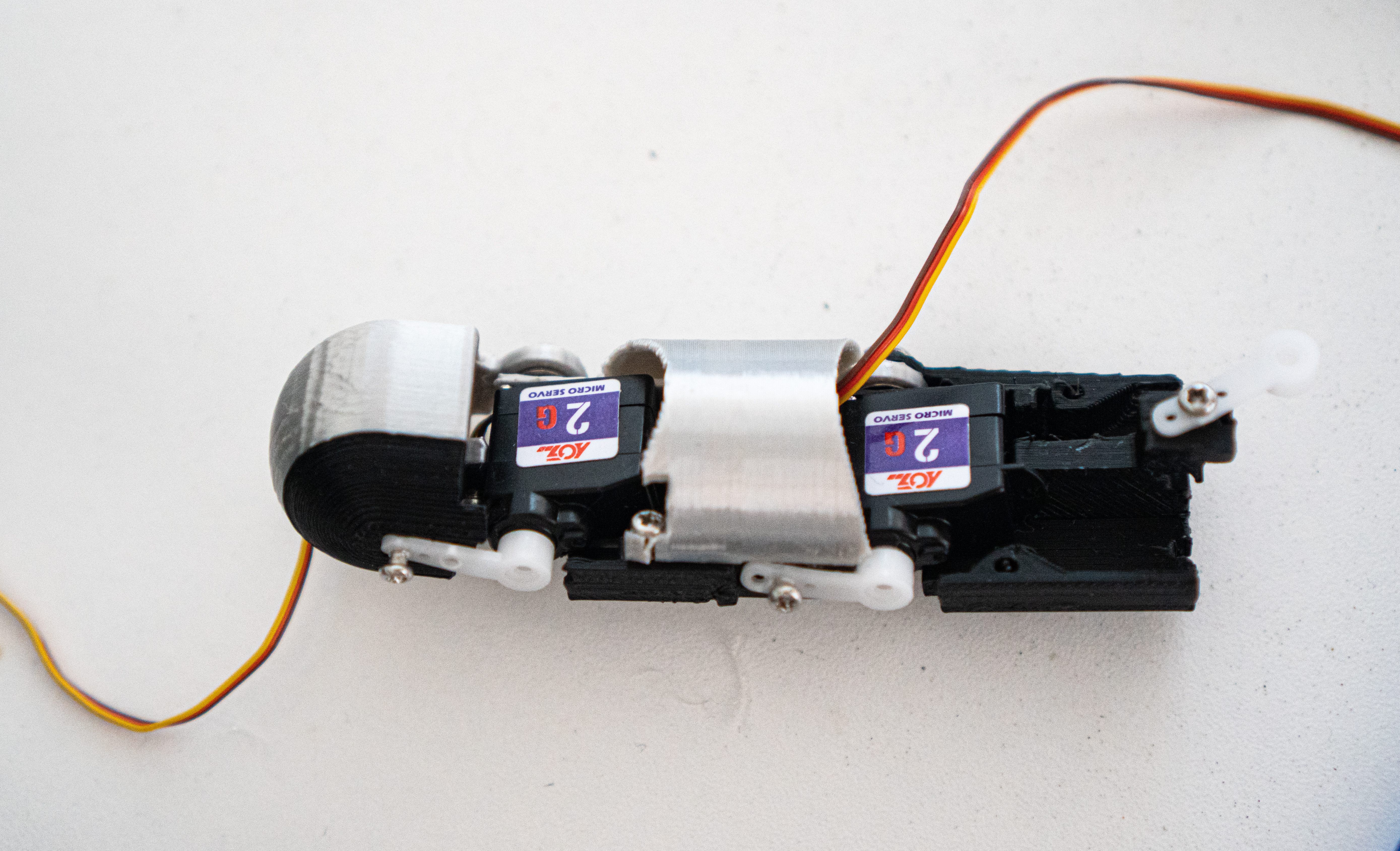
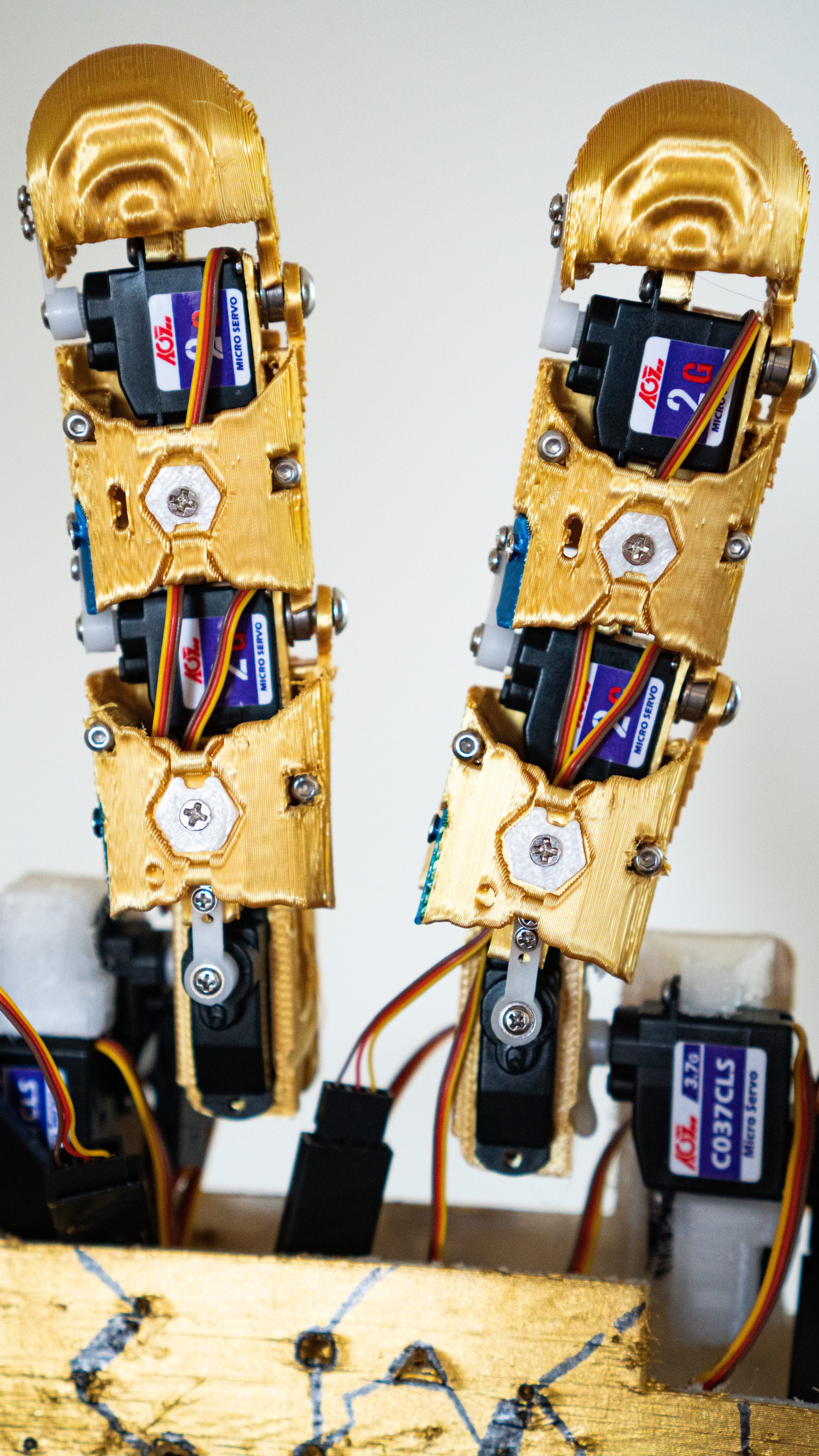
First tests performed: the top and middle of each finger have two 2g servos.
The base of each finger has 2 servos of 3.7g, (excluding the thumb which has 3 servos)
The thumb has 5 DOF - allowing high dexterity
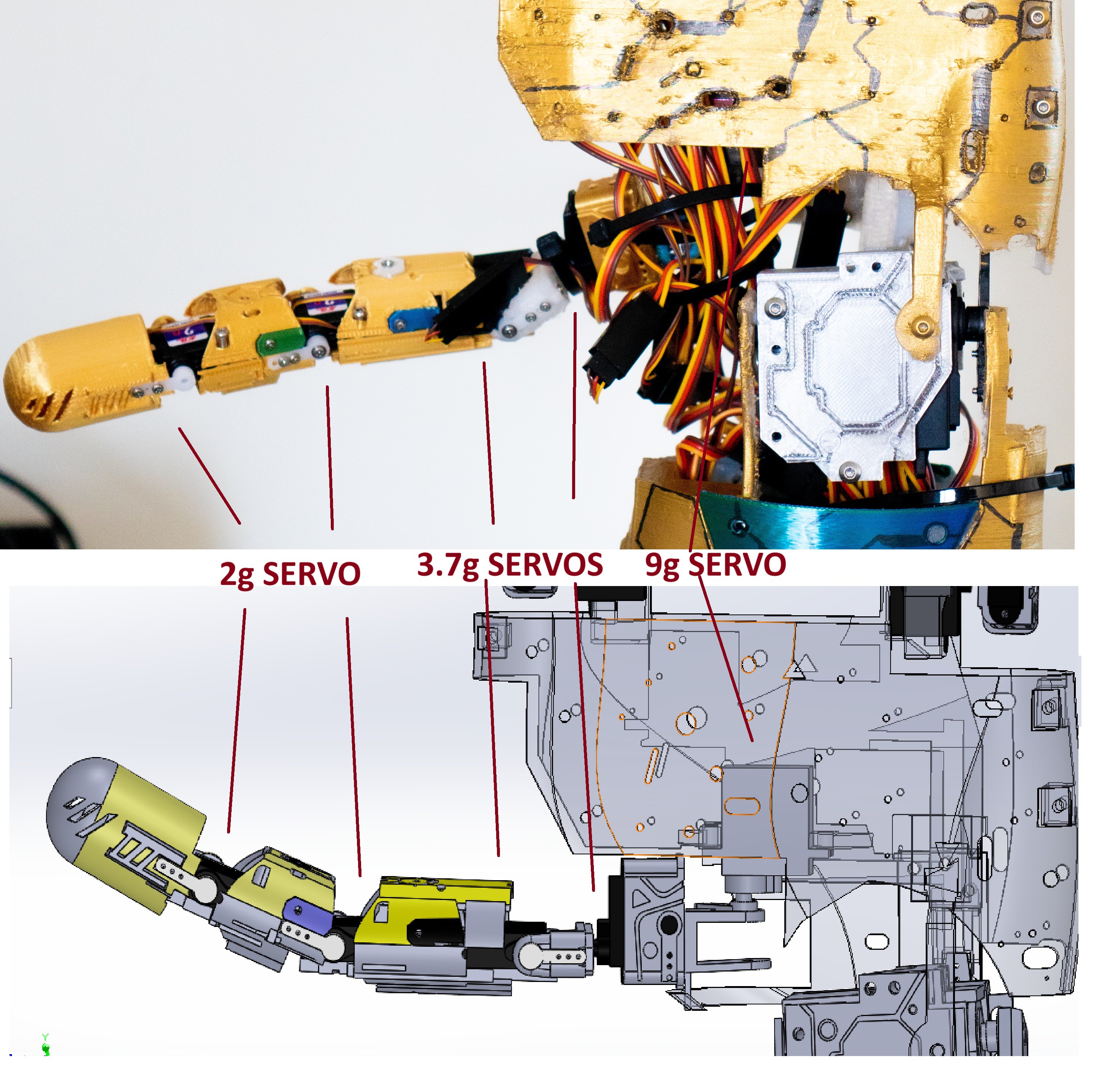
The wrist has two degrees of freedom. I used two MG996R servos, whose structure I modified to take up less space, in what we could call a two-axis servo.
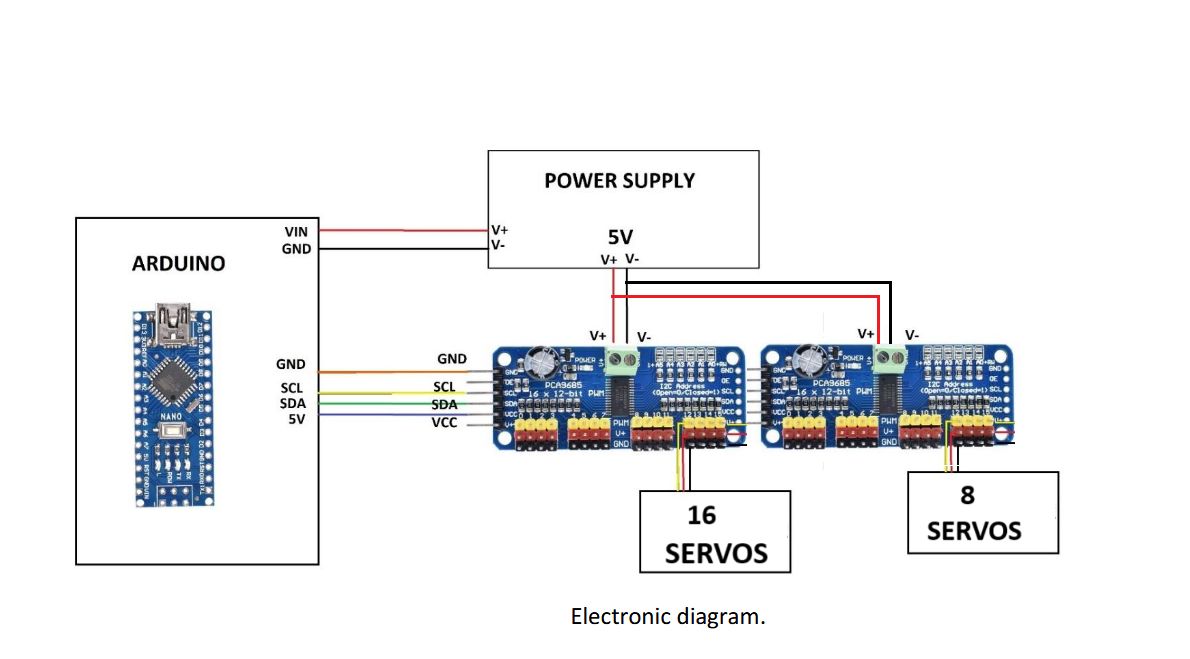
Electronic control diagram
The forearm has a 45kg servo that moves 270 degrees
After printing and assembling all the fingers and palm, perform initial tests to see the robotic hand's reversible ambidextrous function.
American Sing Language:
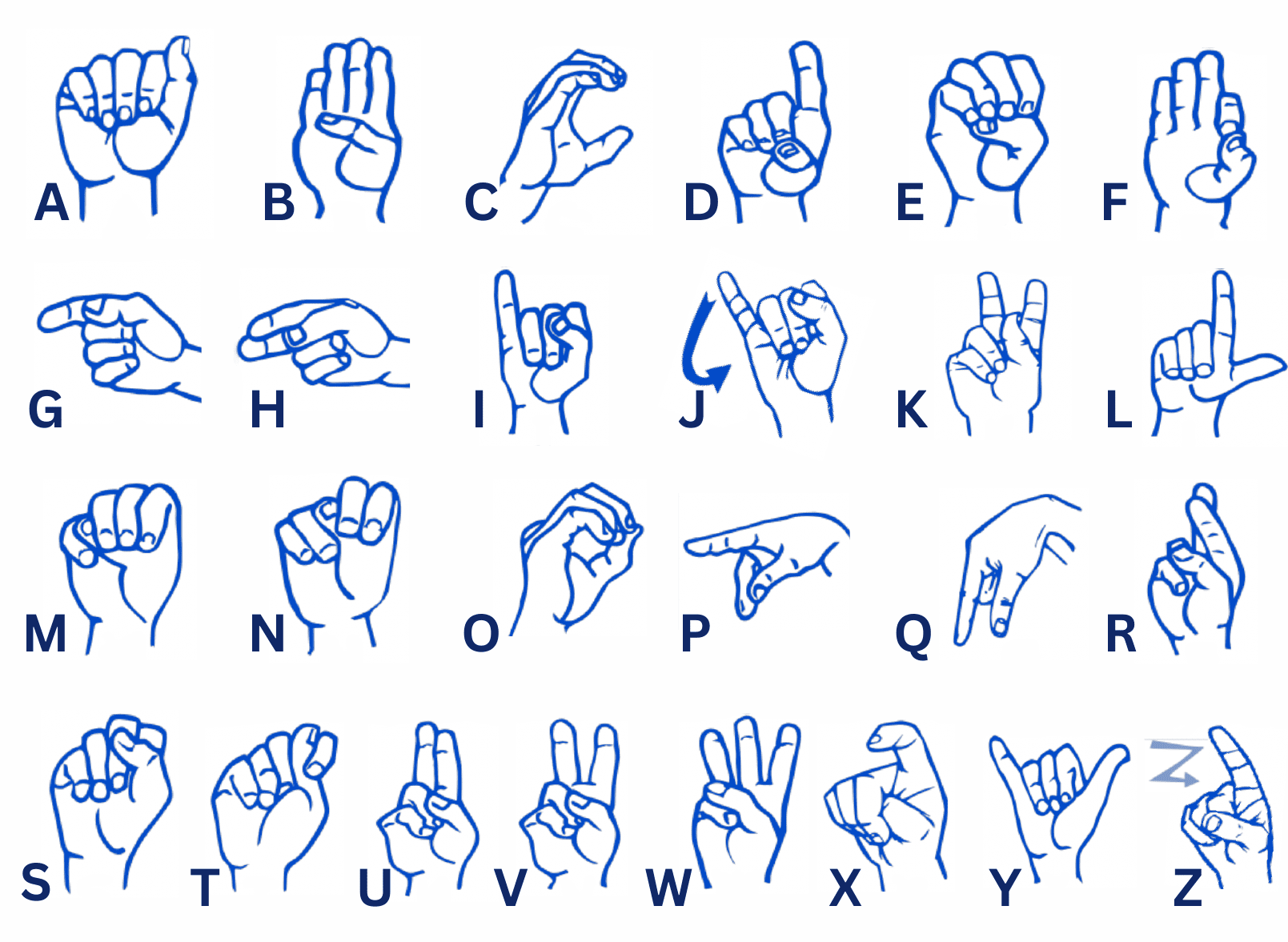
Once the entire robotic arm was assembled, I proceeded to program each of the 26 letters of the American Sign Language alphabet in both configurations.
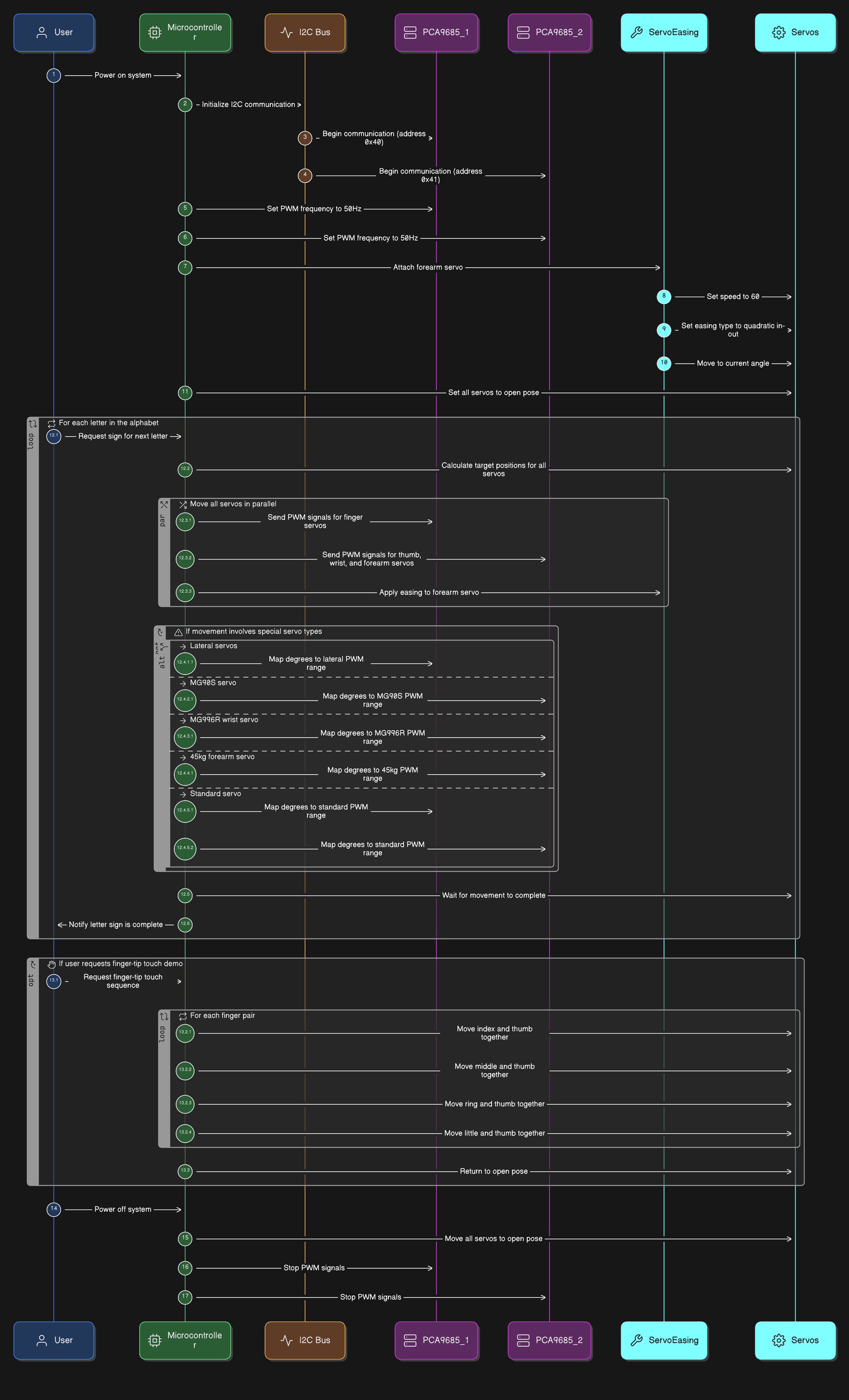
Finally, to test the robotic arm's dexterity, I programmed random movements. The programming isn't complicated; it consists of mapping the position in which you want each servo to move.
here is a coding flow chart:
 Emily
Emily
 Brian Brocken
Brian Brocken
 Roger Rabbit
Roger Rabbit
 dannyvandenheuvel
dannyvandenheuvel