 alexw
alexw
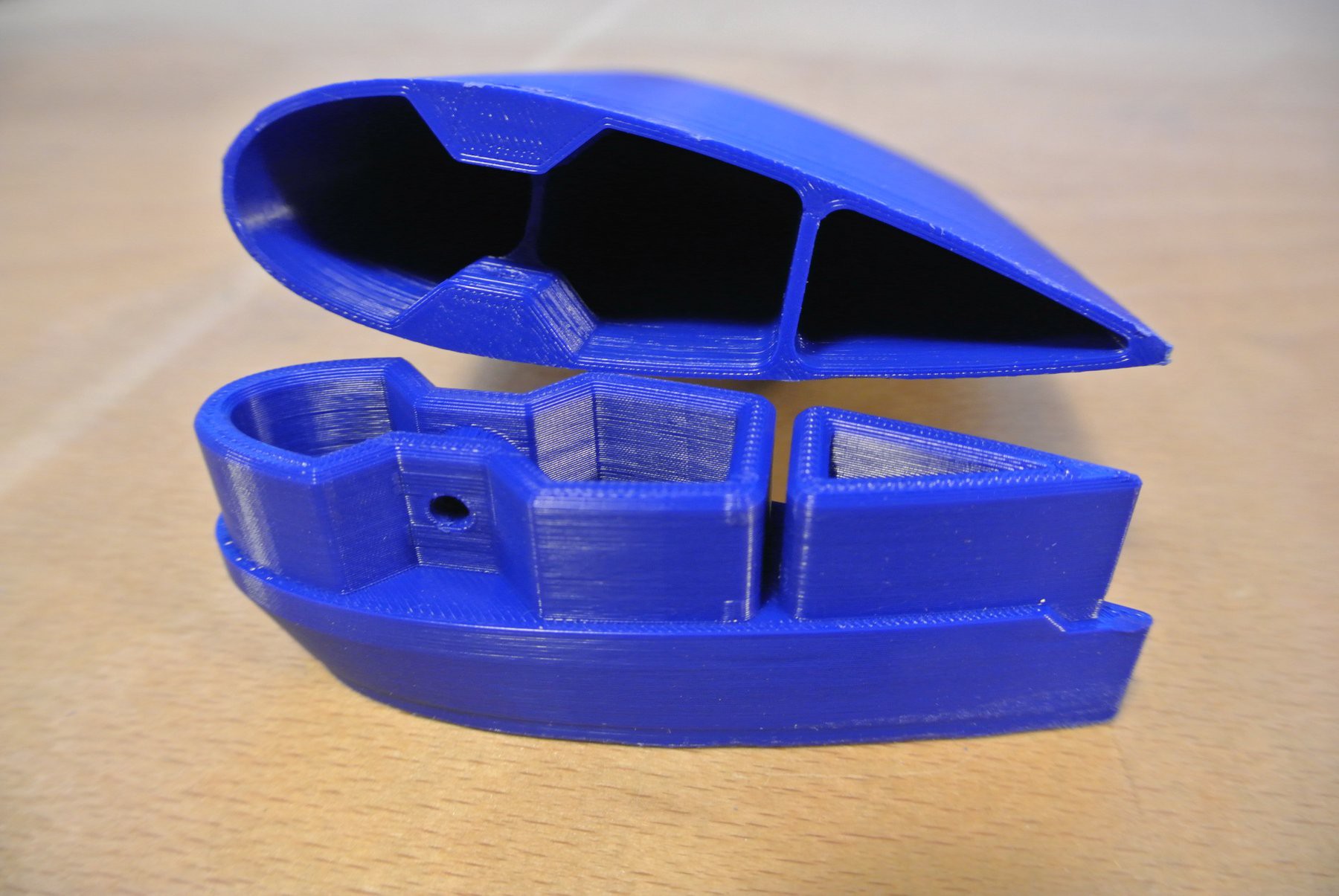
Having produced a complete CAD model of the glider, I started printing the parts for the glider. I own a Mini Kossel printer, which is a delta style printer (as opposed to the standard cartesian printer) The components were printed at a layer height of 0.4mm, for greater structural strength and faster prints. Printing all the pieces took approximately 80 hours. I had to print some pieces multiple times to get the dimensions of some features correct (bolt and tubing holes, etc).
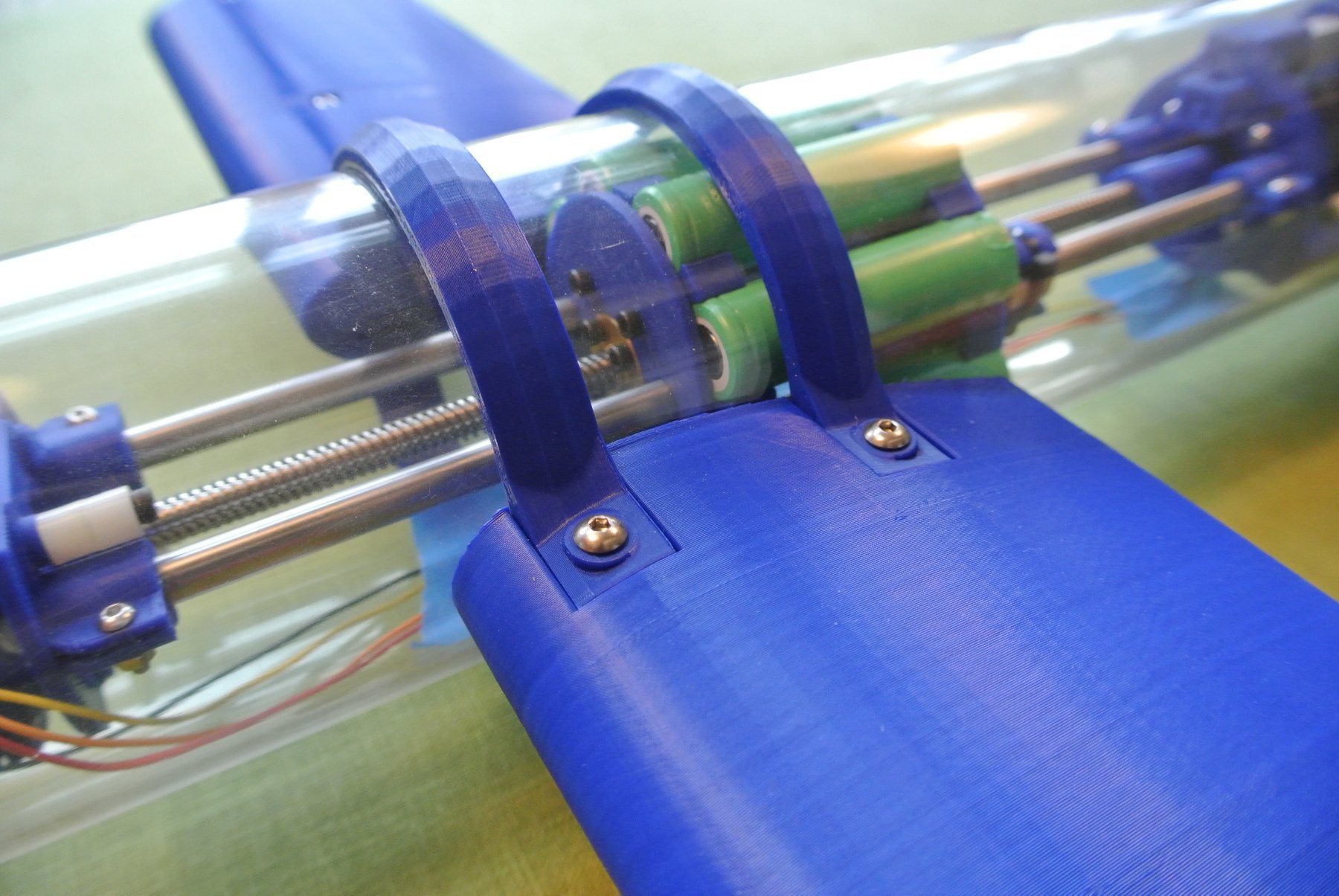

Printed material is less dense than water, so I made the models hollow in some areas, so that they could be filled with ballast. I am going to use a PVA/sand mixture as the ballast, as this is denser than water (~1.7g/cc depending upon the ratio of PVA to sand) and can be formed quite easily.
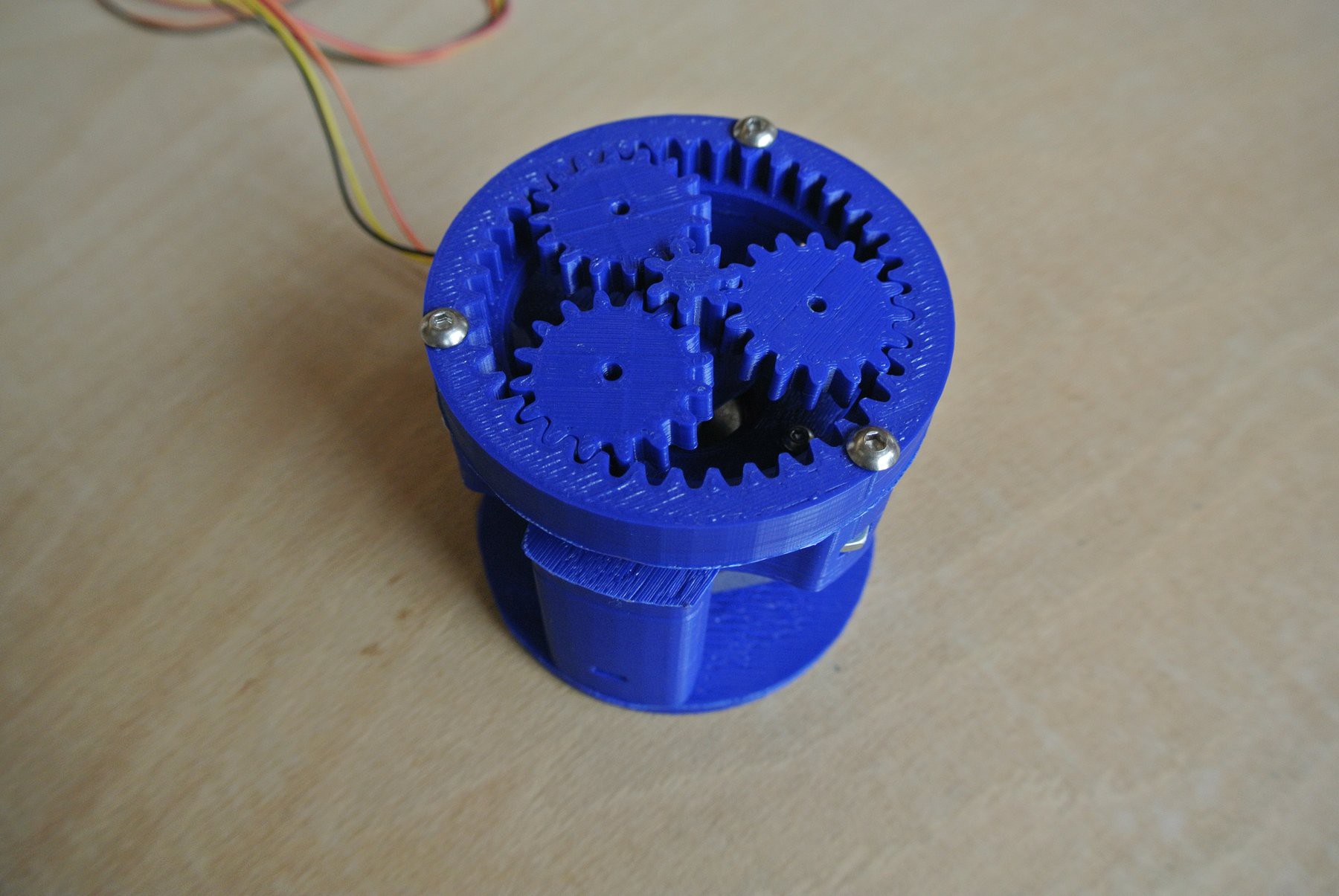
I
have hooked the stepper motors up to an Arduino and over the next
week or so, I will test the movement sub-systems and post a build
update showing basic functionality.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Looks really great. Can't wait to see the first video.
Are you sure? yes | no
Thanks, I've written a quick program to control the motors for testing and will video/upload this in the next couple of days
Are you sure? yes | no
Congrats, this looks great!
Are you sure? yes | no