 kelvinA
kelvinAInspired by the humanoid robotics industry that's been heating up in this second half of 2025, I started to formulate my own thoughts about them. After discussing with my mother, I came to a notable conclusion:
I can last 12 days without thinking "I need to sweep".
I cannot last 12 hours without thinking "I need to eat".
Thus, my conclusion was that if I was ever on a cutting-edge robotics team, it would be one trying to make a robotic cook. And no I don't mean the robots that seem to be a concrete mixer food fryer, but something that can chop chives that Reddit would say are almost perfect.
While it's probably possible to design a fridge-freezer-airfryer-microwave-chopping-blending vending machine, the trendy way (i.e. the way to get that VC money and star-eyed engineering graduates) is via robotics.
I was quite impressed with ALLEX from WIRobotics , particularly the robotic hands:
Robot vacuum companies are also starting to implement arms:
Thus, I started to focus on hands, most likely because I've already been thinking about the human hand in general due to #Tetizmol [gd0153] and #Tetent [gd0090].
Coincidentally enough, Boston Dynamics came out with a video on their 3-digit gripper and I agree that you can do a lot with just 3. I also learned from Sunday of the importance of being able to pick up more than one object.
Because I like symmetry, these are essentially the reason behind 6 digits.
The next question to solve was how many degrees of freedom do they need to have, and my solution is as follows:
- As mentioned by Boston Dynamics, the gripper has to be durable and could be fallen upon. I imagine this is why human hands can flatten out - to increase the surface area from impact.
- There are many grasps that only need 2 fingers and no thumb, thus this concept moves them together/apart opposite but equally.
- The fingers and thumb have 2 degrees of freedom. For the fingers, it's to be able to do things like type on a keyboard. The thumb has a rotate-out and flex range of motion.
- The palm splits to give each hand half more space to work in. It's also to allow a single half to more easily fit into places such as a cup.
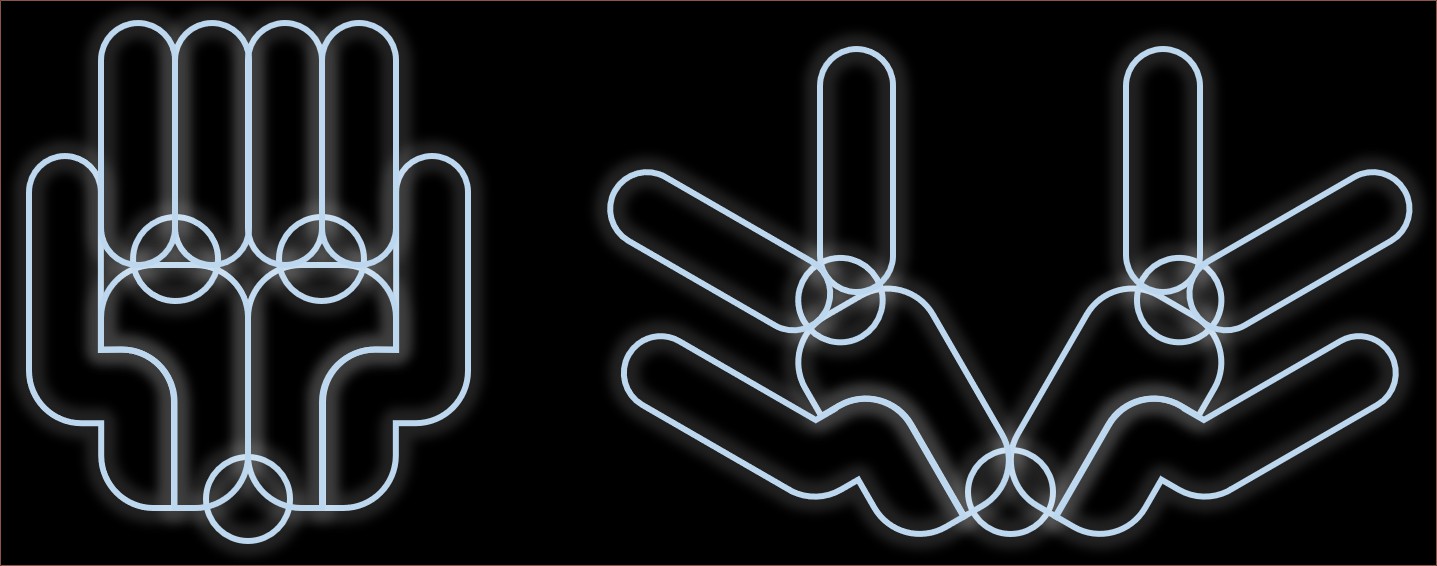
The two fingers aren't locked to their same axis. In other words, the design should allow to "cross the fingers":

All in all, there should be:
- 12 DOF for the fingers/thumbs
- 3 DOF for splitting the palm and fingers
- 2 DOF for the wrist
Thus 17 DOF total.
This hand needs to be water washable, be able to feel and have something resembling nails to be able to do things like peel an orange.
I learned quite a bit from https://rodneybrooks.com/why-todays-humanoids-wont-learn-dexterity/, such as Meta's touch sensors:
I also learned quite a bit from https://rodneybrooks.com/rodney-brooks-three-laws-of-robotics/, namely the first law:
The visual appearance of a robot makes a promise about what it can do and how smart it is. It needs to deliver or slightly over deliver on that promise or it will not be accepted.
From this, I can gather that the robotic hand needs 14 m/s of acceleration and cannot sound like a symphony of hobbyist servos during operation. Additionally, as mentioned in the 3rd law, there needs to be minimum 99.9%, ideally 99.999% reliability. It sounds excessive, but if not falling was 99.9% reliable, people would trip and fall every thousand steps on average. This means characterising wear-and-tear.
Obviously, having the idea and implementing the solution are vastly different things. I just wanted to write this for the potential chance that someone on a team to design yet another robot arm stumbles upon it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.