Peter McCloud
Peter McCloud-
Wireless Data Proof of Concept
03/26/2017 at 15:55 • 0 commentsThe EVPR will use wireless data transmission to control the servos embedded inside of the rotor hub. An ESP32 will be at the heart of the on-board electronics, receiving the data signal and controlling the servos.
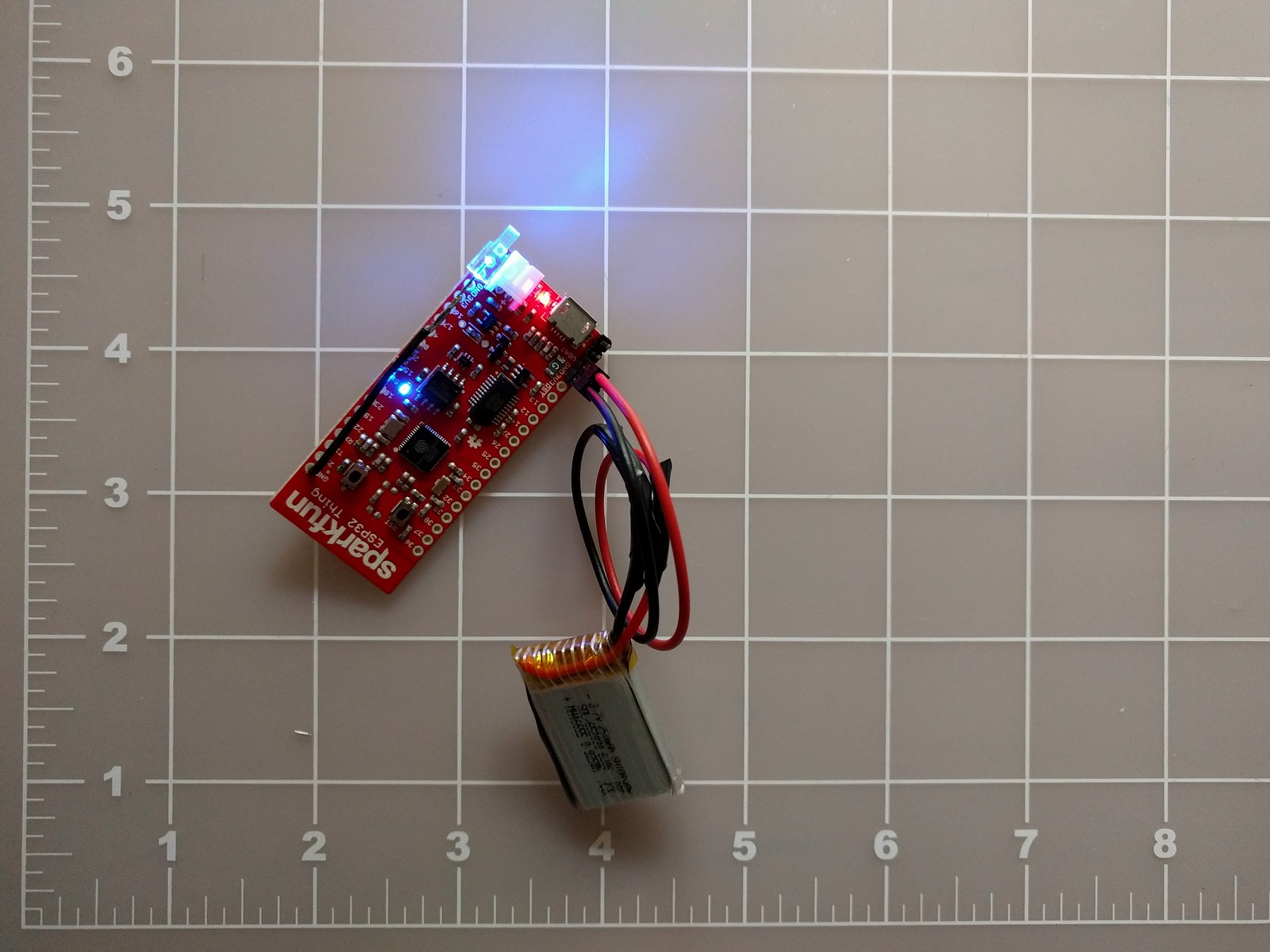
To test whether the wireless data concept will work on a spinning rotor, a Sparkfun ESP32 Thing Dev Board was placed on a fixed-pitch rotor with a battery for power. A test was run to confirm whether an LED on the board could be turned on and off remotely over WiFi.
Below are shots of the dev board setup before and after being placed on the fixed-pitch rotor. Since the built-in LED on the board would be hidden inside the rotor hub, an extra LED(rectangular blue) was connected and placed in a location that would be visible externally.
![]()
![]()
The test was successful (video below), demonstrating that the wireless system should work for controlling servos for the EVPR.
-
Blade Torque and Servo Sizing
03/22/2017 at 04:38 • 0 commentsOne of the driving parameters for a variable pitch rotor is the torque required to actuate the blades. The servo size required directly translates to the torque required to maintain the blade position. As part of the #Inexpensive Composite Propellers/Rotors project, I recently covered the RC series of airfoils which are specifically designed for rotorcraft. This airfoils were specifically designed to have low pitching moments.
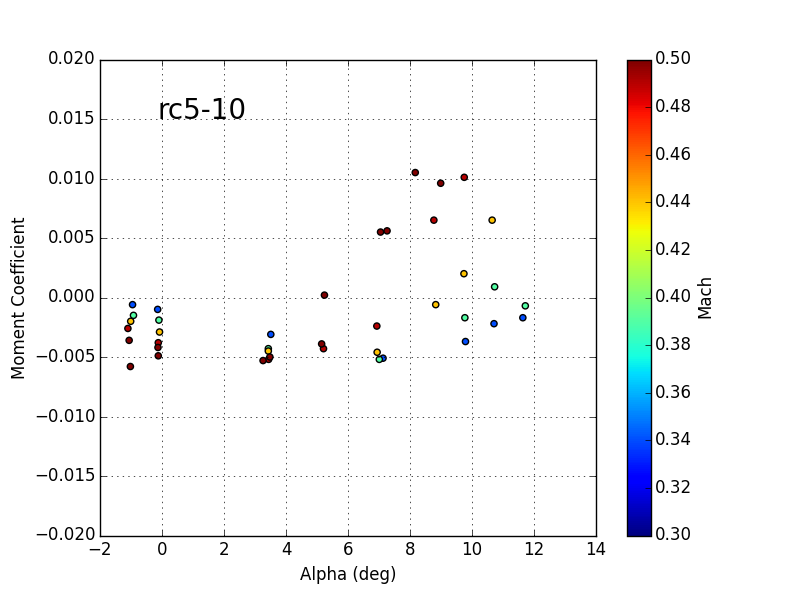
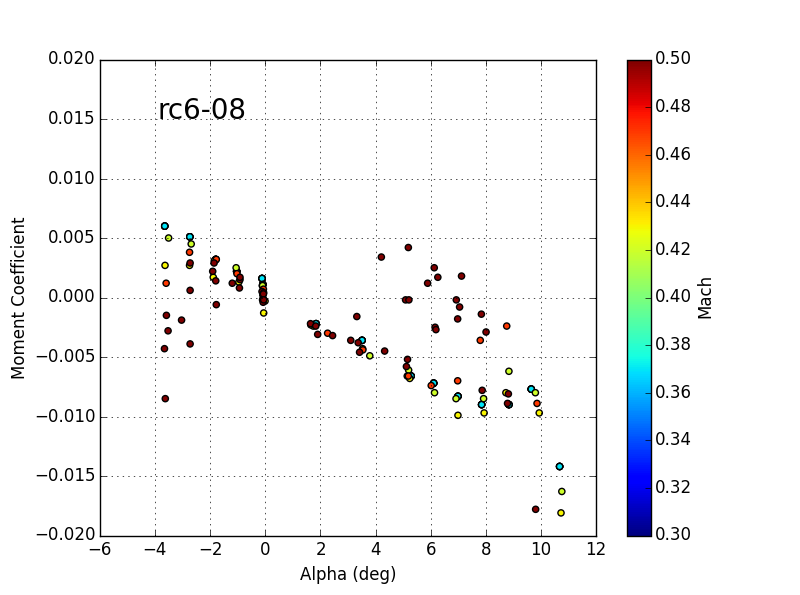
How low? The two plots below show the moment coefficients for the rc5-10, designed for inboard rotor section and the rc6-08, designed for rotor tips. For the region of interest the moments coefficients are within +/- 0.005. Comparing this to the NACA 2412, which was the airfoil used previously, the pitching moment is 5-10 times greater in magnitude for comparable angles of attack.
![]()
![]()
The shape of the blades for the EVPR will be identical the 3rd generation rotors currently being built for #Inexpensive Composite Propellers/Rotors minus the hub.
The overall blade torque required at maximum thrust was calculated. The per blade torque requirement ends up being 1.52 N-m or 1.12 ft-lbs. However the hobby servo world works in kg-cm, so the requirement is 15.5 kg-cm. However, the travel required to go from zero thrust to full thrust for the rotor blades is much less than the full travel for a servo. The gearing ratio is TBD, but a factor of 2-3 is likely, so the servo torque needs to be greater than 5-8 kg-cm.
The initial servo chosen was the Tower Pro MG996R. They were chosen because they were what I have on hand, but they have sufficient torque (10 kg-cm) and they are fairly light (55 g)
-
Project Inspiration
03/21/2017 at 03:26 • 0 commentsVariable pitch rotors have been in the back of mind ever since starting #Goliath - A Gas Powered Quadcopter. The default control scheme was always vanes underneath the rotors, but variable pitch would be a more elegant solution.
The inspiration for this project started after coming across Solid-State Rotor: A Demonstration, an AIAA paper by Onur Bilgen and Thomas E. Alberts. The paper is behind an AIAA pay wall, but the the gist of the paper is that they built solid-state rotors using piezo-electric materials that could change the rotor shape. The electronics for the materials were embedded inside the rotor hub. Power was provided via a generator built into the hub.
This project differs from the prior work in a few ways. The actuation is provided via servo instead of piezo-electric actuators. It'd be really cool to go completely solid-state, but the actuators are pretty expensive and they'd make the rotor cost more than $1000. It's also for bigger rotors, and this project will be open source.
EVPR: Electric Variable Pitch Rotor
An electrically actuated variable pitch rotor with a wireless interface