 Mike Rigsby
Mike RigsbyFebruary 19, 2026. Zeno finds the trashcan, then turns around to find me. The goal--Zeno to come to me on command, grasp trash in its gripper then deposit the trash in a can--is coming along. I just added a second Huskylens camera that detects the color of the trashcan and goes to it.
My wife thinks that all good robots need a name, so we discussed things, came up with a list and narrowed it down to either Lars or Zeno. This robot is based on MARS by Innate.bot. MARS is an interesting AI robot that is available now. The video below is a snippet of what the robot can do.
Lars (large MARS) was a high contender for the name. I'll tell you my thoughts on Zeno and why that won out. I've dealt with many robots. I own two Aibo's (1999 and 2024 versions). I have an Astro robot (available from Amazon by invitation). I always wanted, but never acquired a Heathkit Hero robot. I currently have a pre-order in place for the humanoid, Neo (due to arrive sometime during 2026). I've applied to be a beta tester for Memo robot. Notice that these robots, Aibo, Astro, Hero, Neo and Memo all end in the letter "o." Obviously, Zeno sounds like it belongs.
MARS has an arm that can be "trained," it comes with an arm that can be used to teleoperate and train the system. The arm uses Dynamixel servos, so I thought it wouldn't be too hard to scale this up using larger Dynamixel servos while using the MARS training system. I have the parts and may try this, but I've done some thinking on household robotic applications and I want to try something else. I've played with grippers (see my hackaday project) and I like the idea of a gripper that "just needs to be near an object to close and hold it."
In principle, another thing that bothers me is that so many systems seem to use cameras only (x, y data) without using distance (z data). If I can identify a bottle of water and move to it (x, y data), then I only need distance (z data--obtainable by laser detector) to place the bottle in the center of my gripper. A close command will grasp the bottle.
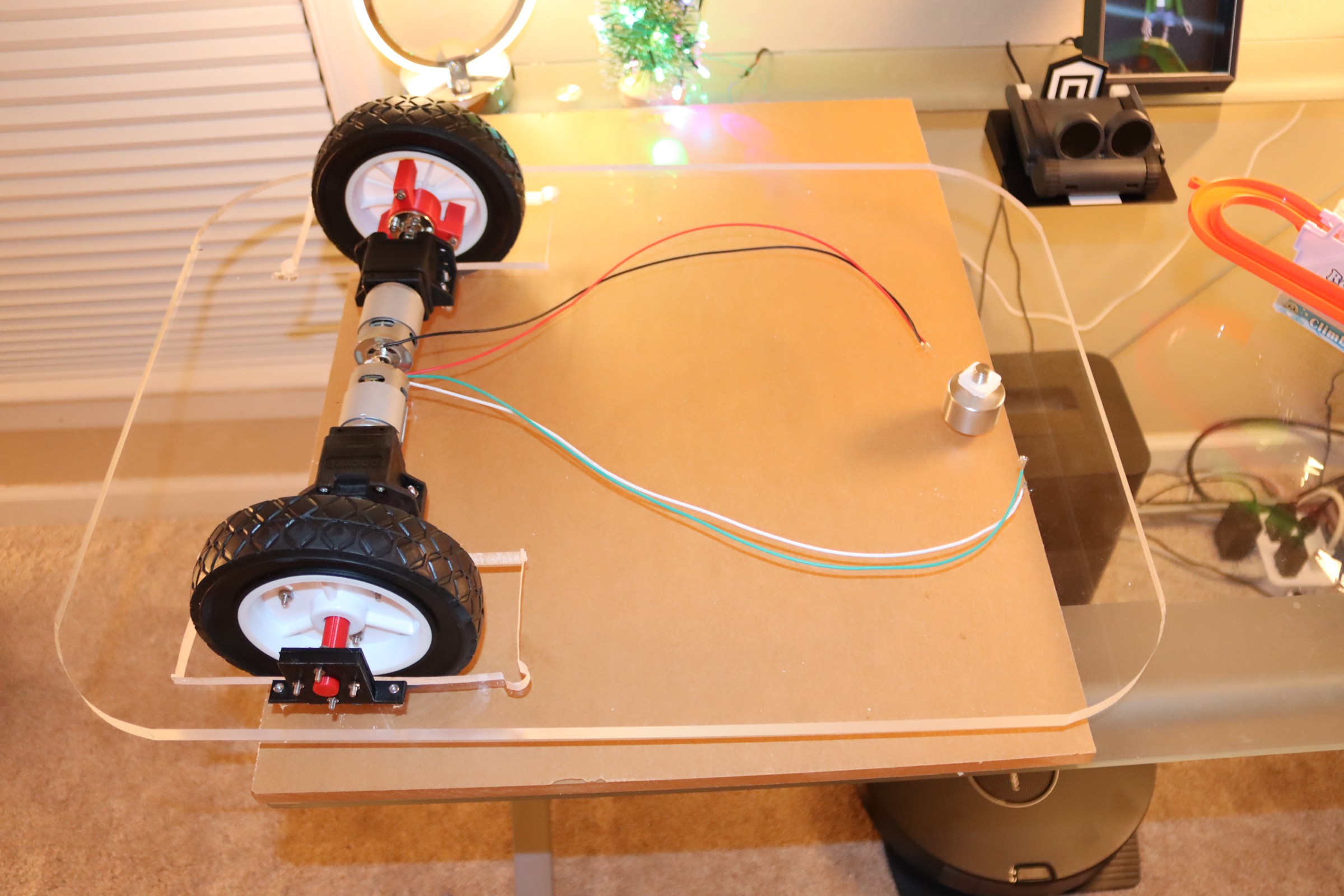
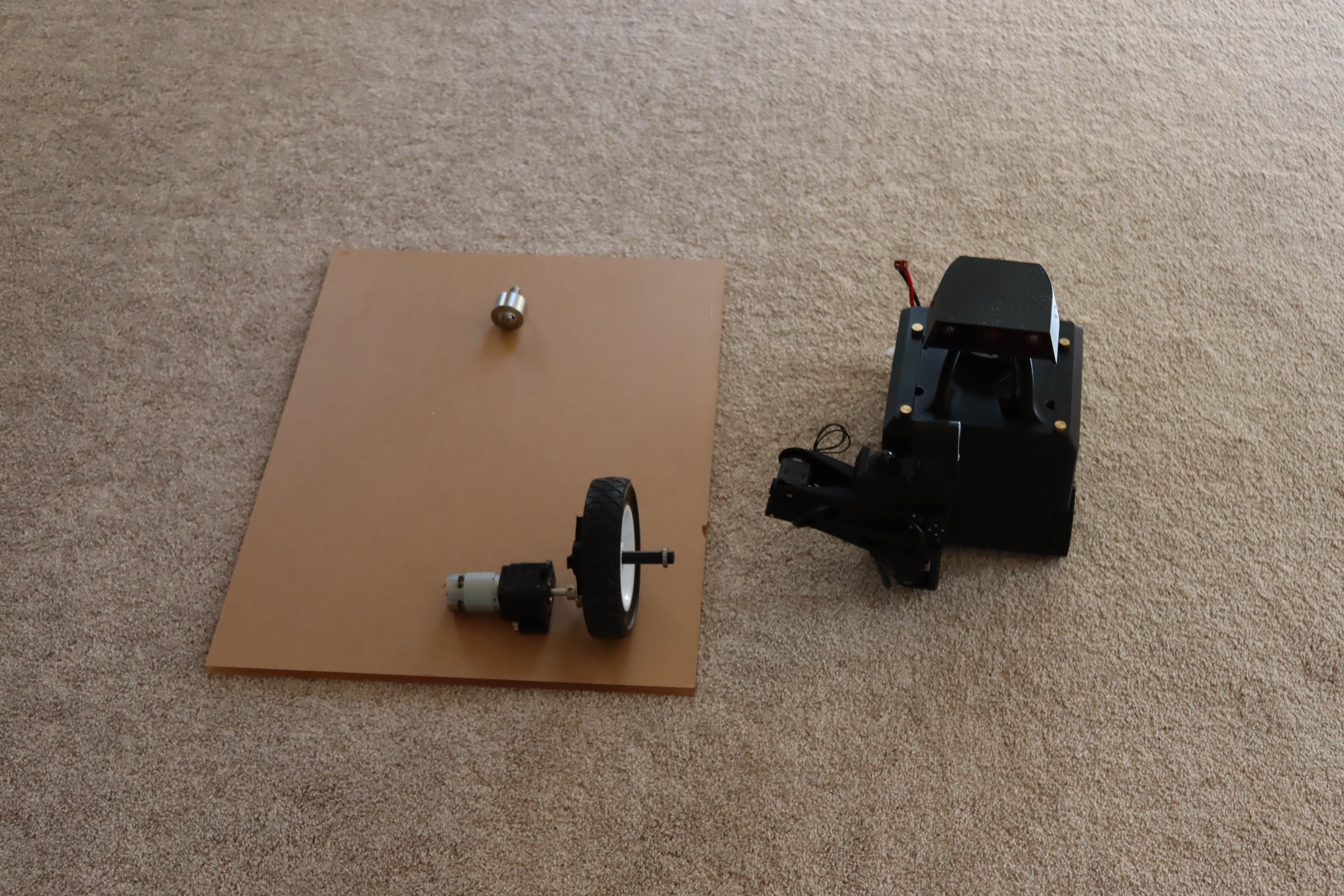
Zeno is my first attempt at a robot strong enough to actually do things. I've taken a "one Arduino per function" approach and I currently have six Arduinos in use (a mega with a motor shield for the drive motors, four Unos (one for each distance sensor) and one Uno to connect the Huskylens (vision) to the motor control. I'll need one for the gripper, one for the gripper camera/arm, one for the gripper distance detector and one for the voice recognition module. That will put me at ten Arduinos. This makes it easy to troubleshoot, but it does require the larger robot body and power supply.
AI, which uses a lot of computing power--often in the cloud, provides great speech recognition/voice interaction and visual perception. A Huskylens and a speech recognition module provides limited voice control and limited visual recognition--but that's less than fifty dollars and it's local.
Zeno, right now, can follow me around or find me in a room (of course; id1--trained to me, will recognize almost anyone who wanders by).
My short term goal is to have Zeno find a bottle of water and bring it to me (where ever I am in the room) on voice command. After that, I will "train" Zeno to come and retrieve the empty and take it to the trash. I suspect that many simple tasks will not require great machine intelligence and complex arm systems.
We'll see.



 Will Donaldson
Will Donaldson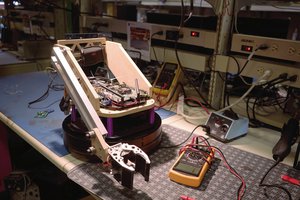
 Jack Qiao
Jack Qiao
 gabebentz
gabebentz
 Duane Degn
Duane Degn