 Mike Rigsby
Mike RigsbyI'm trying to catch up a bit on the construction. Here, I have mounted the motors and the supports for the MARS robot (which I'm probably not going to use in this project--but they are there if I want to put in another platform).
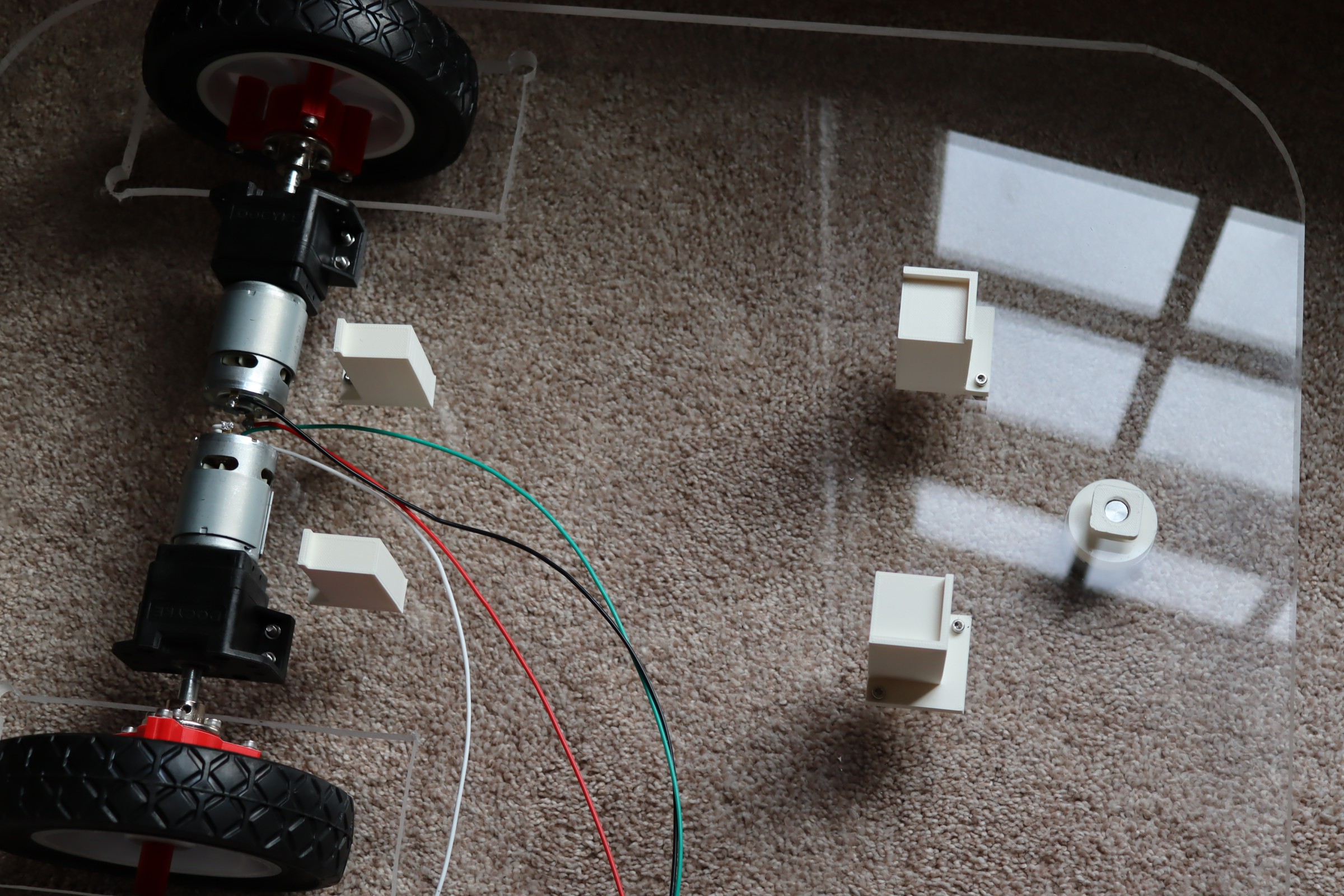
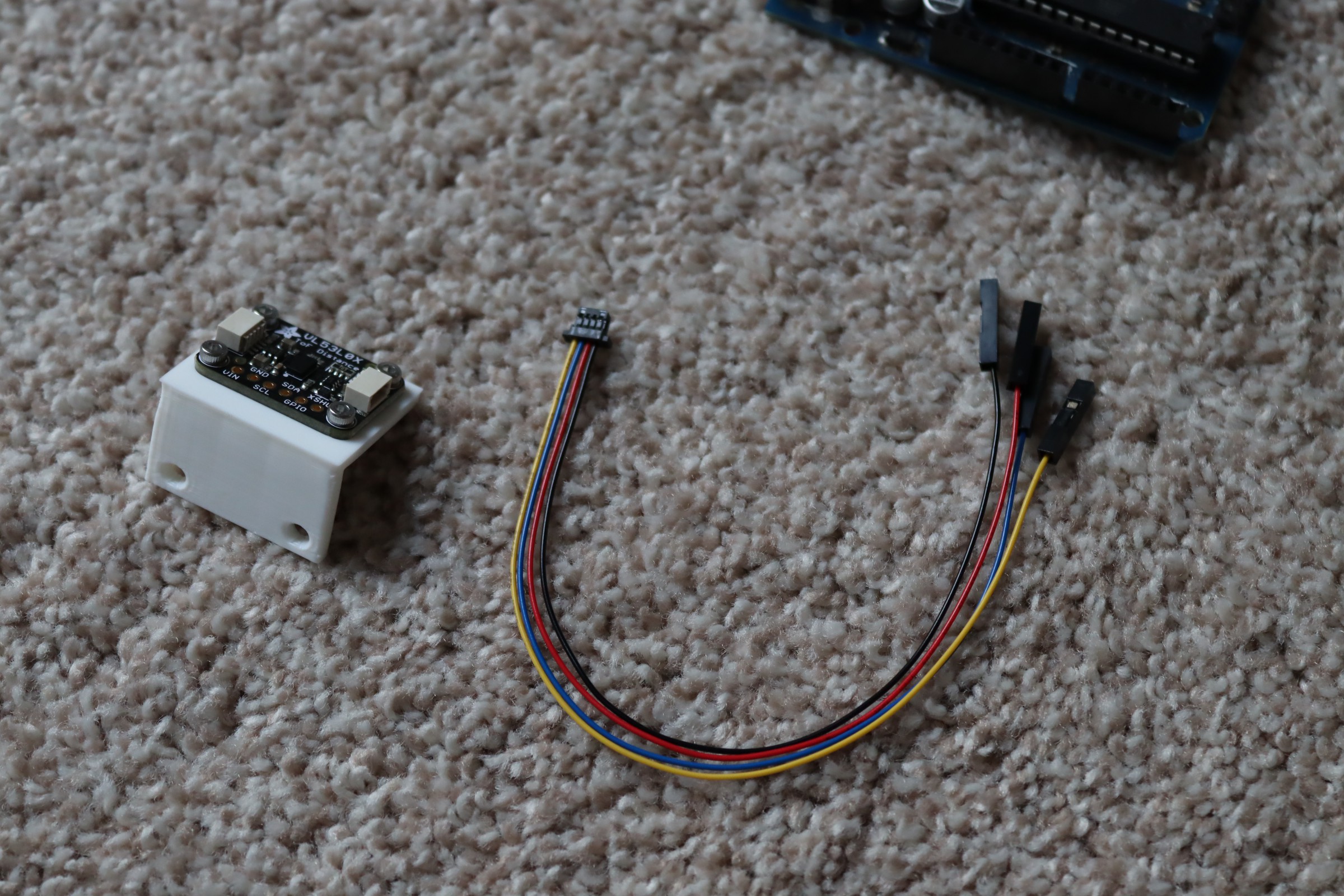
I used two of these gear motors from Amazon. The wheels did not have enough traction, just slipped all the time. I added 3M gripping tape to the wheels and they work fine. This tape is quite costly, but works very well when you need more traction. Below is a lidar assembly, fastened to a 3d printed mount using 2mm screws.
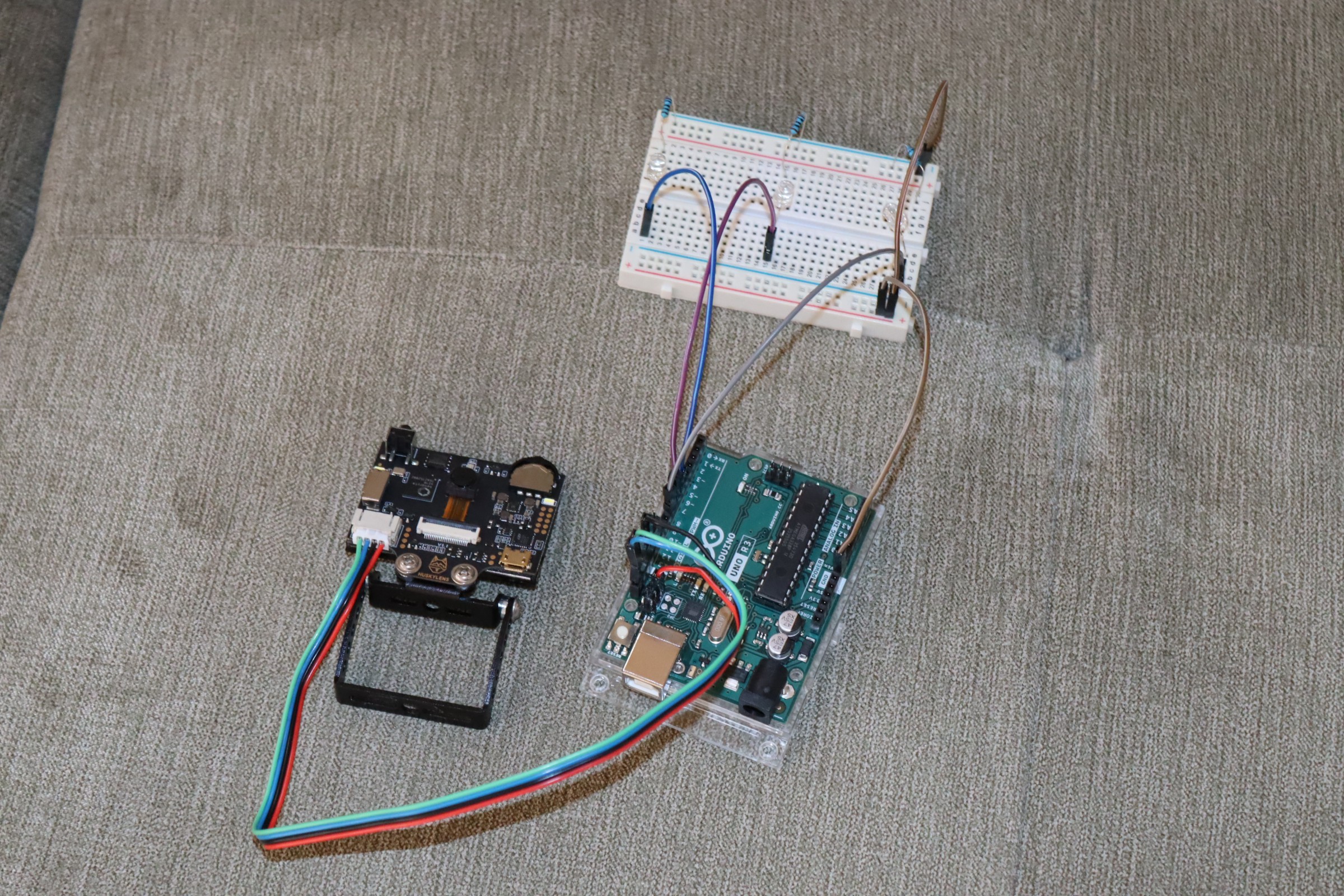
This is a Huskylens and Arduino assembly--used for video detection. I added a breadboard and leds so that I could tell when something is detected and whether it is "left, right, or center."
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.