 Mike Rigsby
Mike RigsbyNow, I'm adding the gripper. This is controlled by Arduino #9 (voice recognition). When the word "trash" is recognized, Pin 7 of Arduino 9 goes high and this goes to pin 7 of Arduino 10. This causes the gripper to close until it senses feedback on the pressure sensor. Then it holds for five seconds and releases (just a test situation for now).
I roughly described the gripper here.
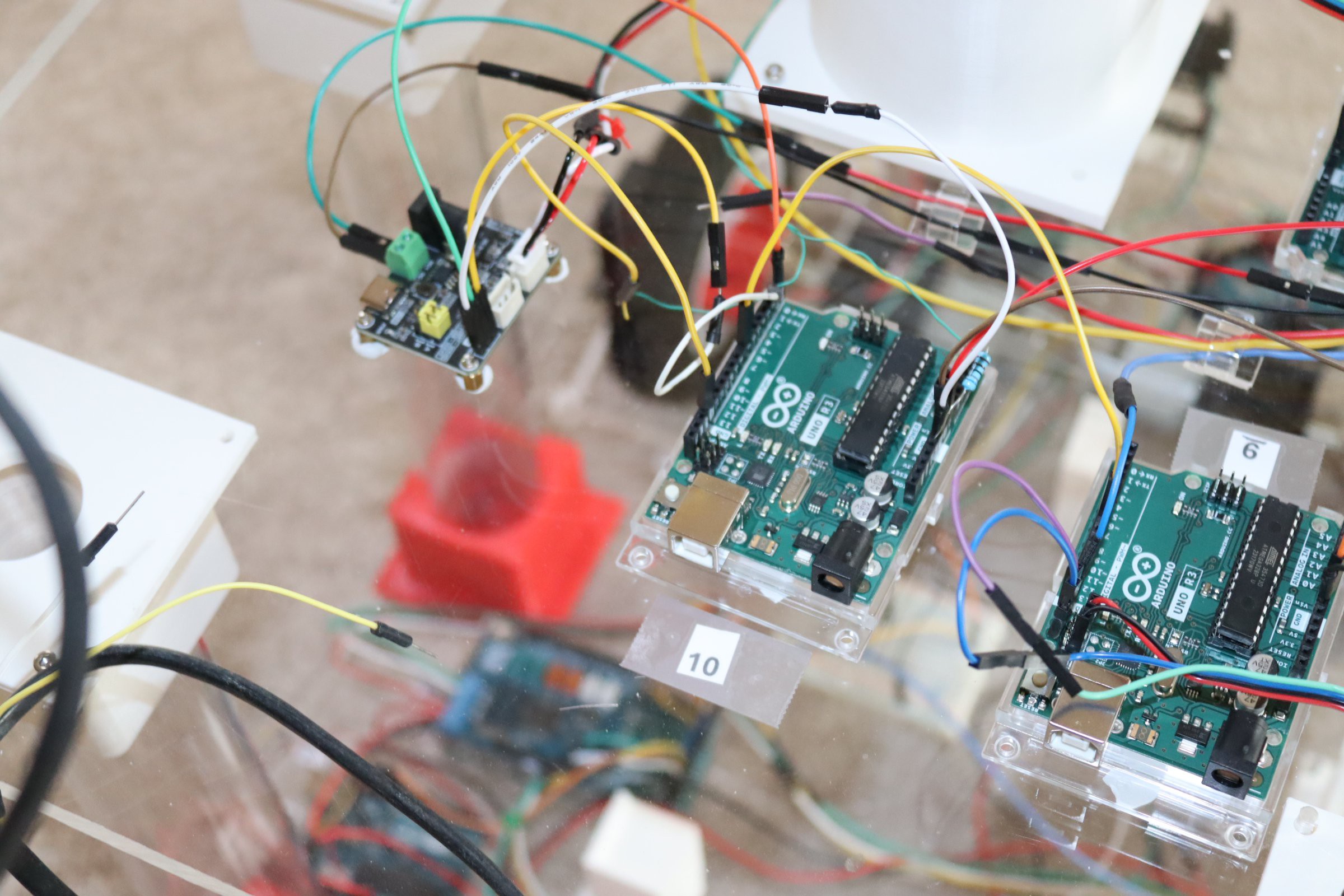
Here's what Arduino #10 and the control module for the servo motors looks like.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.