herbert
herbertMotivation: Rethinking Autonomous Ag-Bots
I needed a small implement carrier for agricultural use, - a vehicle that demands high torque, steady ultra-low speeds (< 1m/s), and excellent off-road capability. But there's a catch: it must be battery-powered and affordable enough for makers in developing countries to replicate.
The "No-GPS" Philosophy
I intentionally avoided GPS. Why? Because true autonomy shouldn't depend on third-party satellite infrastructure. I want a machine that works anywhere, independently.
The Prototype: A Fusion of Leftovers and Innovation
This 1:2 scale prototype was born from parts I had on hand, resulting in a somewhat "unusual" build. The primary goal was to test a concept often dismissed in EV design: Using stepper motors for traction. By equipping them with Field Oriented Control (FOC) drivers, I aimed to turn high-pole-count motors into high-torque, precise drive units.
Early Success & Evolution
The initial tests were surprisingly positive. This encouraged me to expand the scope:
Drive System: Testing FOC-stepper performance in the field.
The car at the biggest slope in my area.
Navigation: Implementing a "Wall-Follower" logic using 8 ultrasonic sensors to navigate obstacles and corners without GPS.
Mechanical Innovation: Evaluating a Rocker-Differential-Suspension. I believe this system will allow even small wheels to tackle tough off-road terrain.
Note: Due to weather conditions, extensive field testing is still ongoing. Documentation of the suspension's off-road performance will follow soon.
🔹 System Overview
This project is an experimental autonomous off-road carrier designed for operation on agricultural terrain such as fields, meadows, and farmland.
Key characteristics:
-
Stepper motors integrated directly into the wheel hubs
-
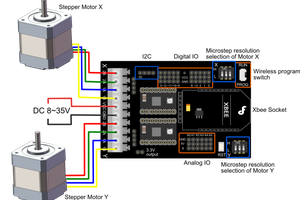
Field-oriented control (FOC) for high torque at very low speed
-
Dual-MCU architecture
-
Motion MCU: real-time motor control
-
Control MCU: high-level behavior, planning, and sensors
-
-
Rocker-differencing kinematic suspension for terrain adaptation
-
Four-wheel steering using high-torque MGR946R servo motors
-
Open-source firmware (GPLv3)
The goal is not maximum speed, but reliable, controllable motion with high torque in rough terrain.
 MakersBox
MakersBox
 Implemented Robotics
Implemented Robotics