0%
0%
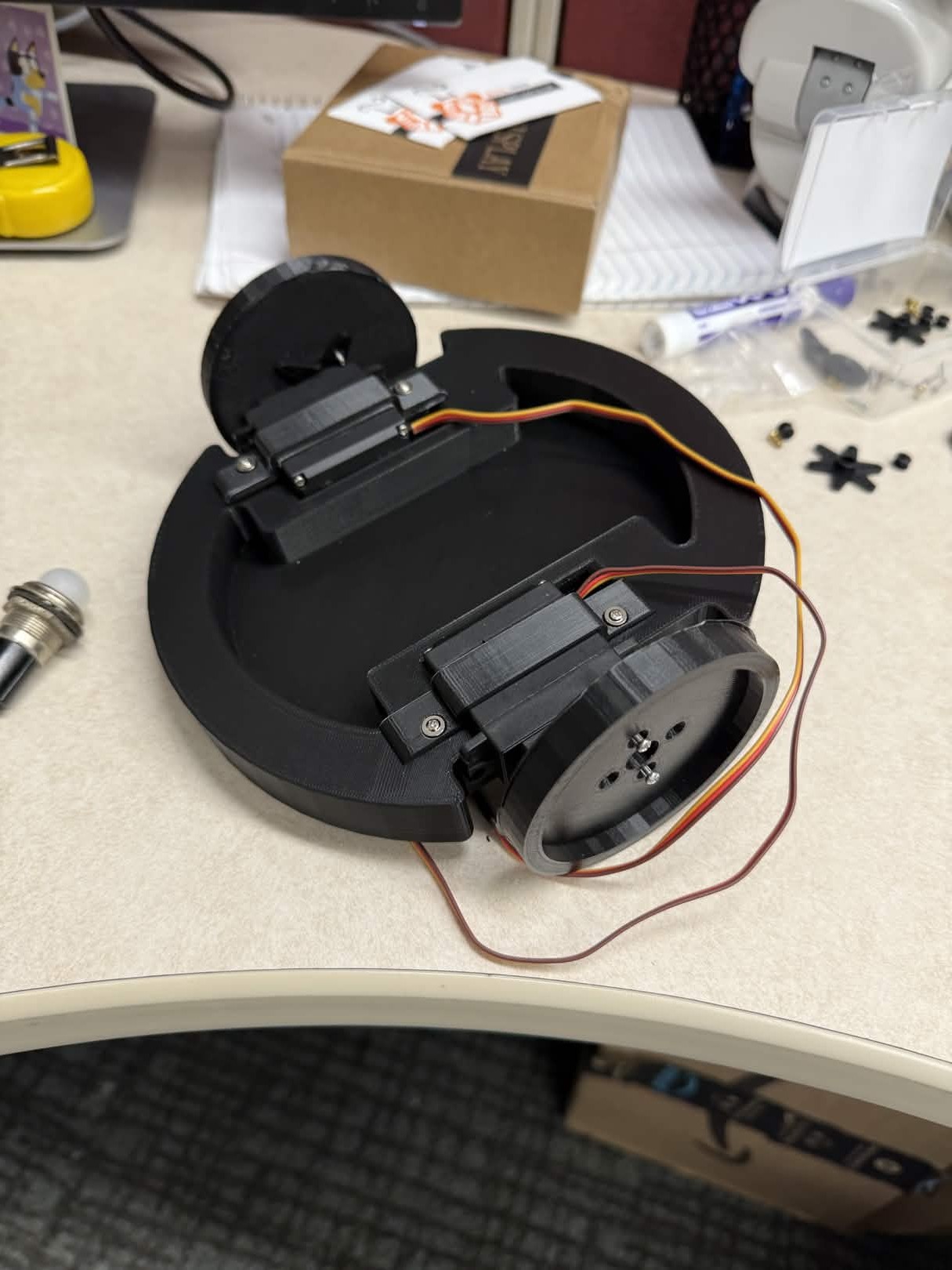
Eclipse: A Local LLM-Powered Mobile Social Robot
An in-progress open-source social and mobile robot powered by a local LLM on a Raspberry Pi. Working name for now is 'Eclipse'.
 Victor Lockwood
Victor LockwoodBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Kenny.Industries
Kenny.Industries
 M.Frouin
M.Frouin
 stefane.lemay
stefane.lemay