0%
0%
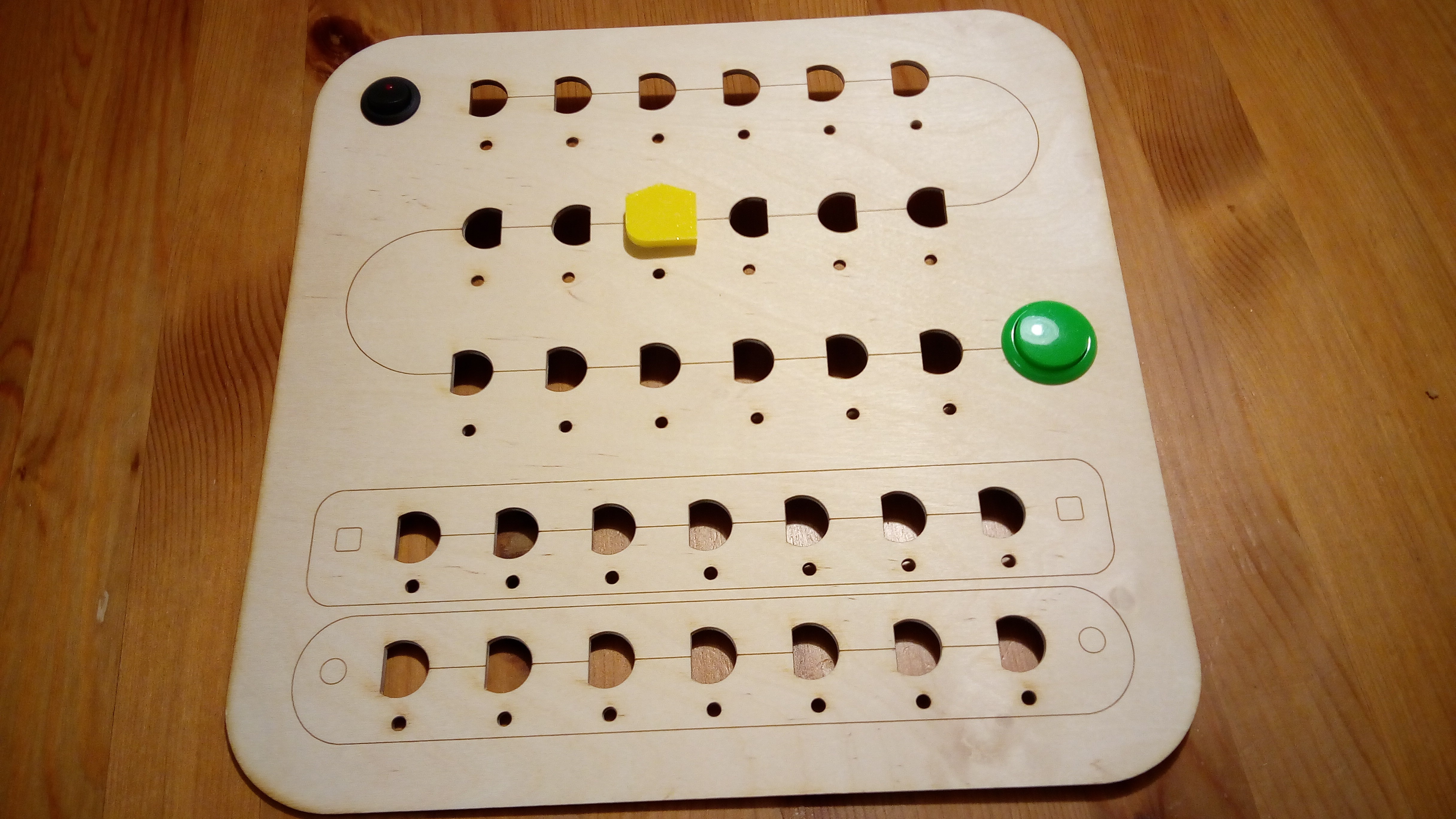
Cubetto Clone
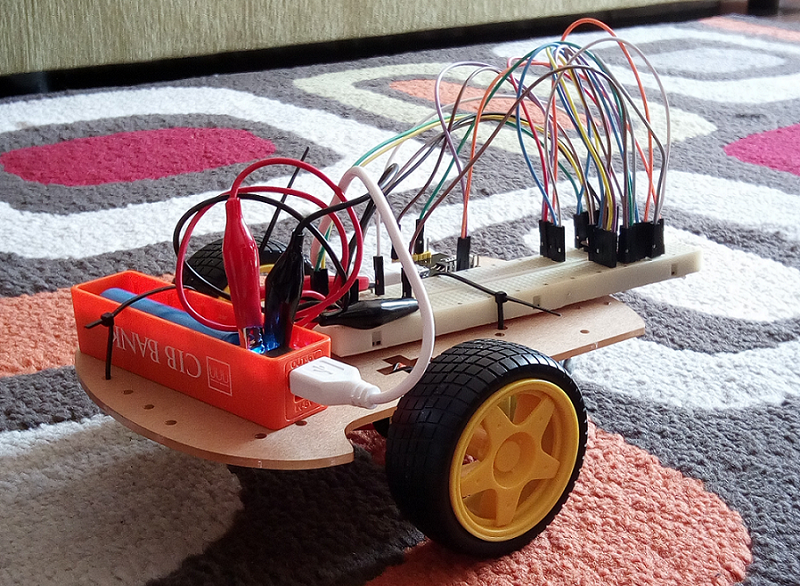
I would like to build a re-engineered Cubetto clone for my son.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



Hi,
Congratulations for the project!
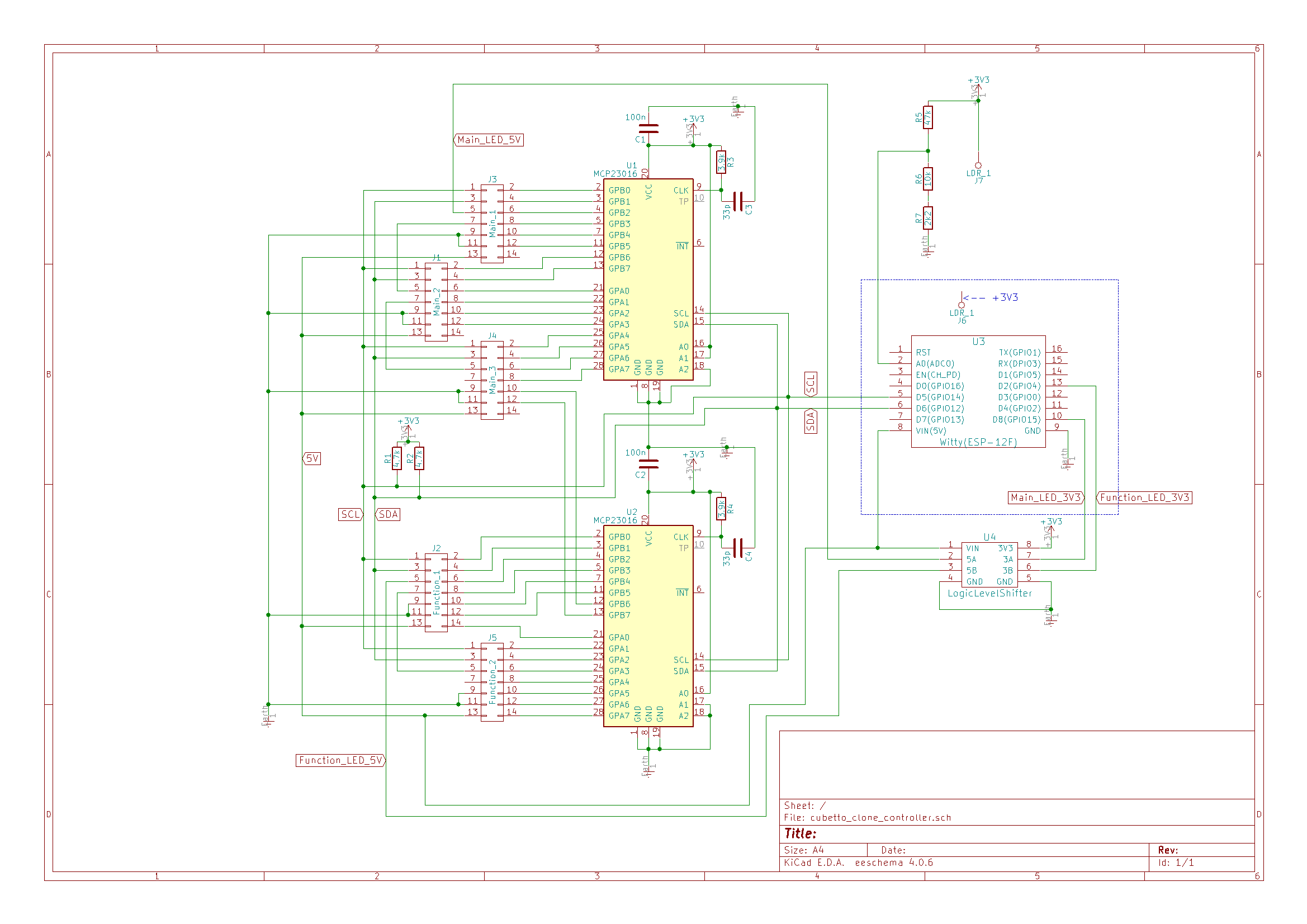
I'm currently trying to replicate it for my daughter but i can't find details for the robot itself. Could you please share some info about the motors drivers you are using and the wiring?
Thanks!