 Alex Du
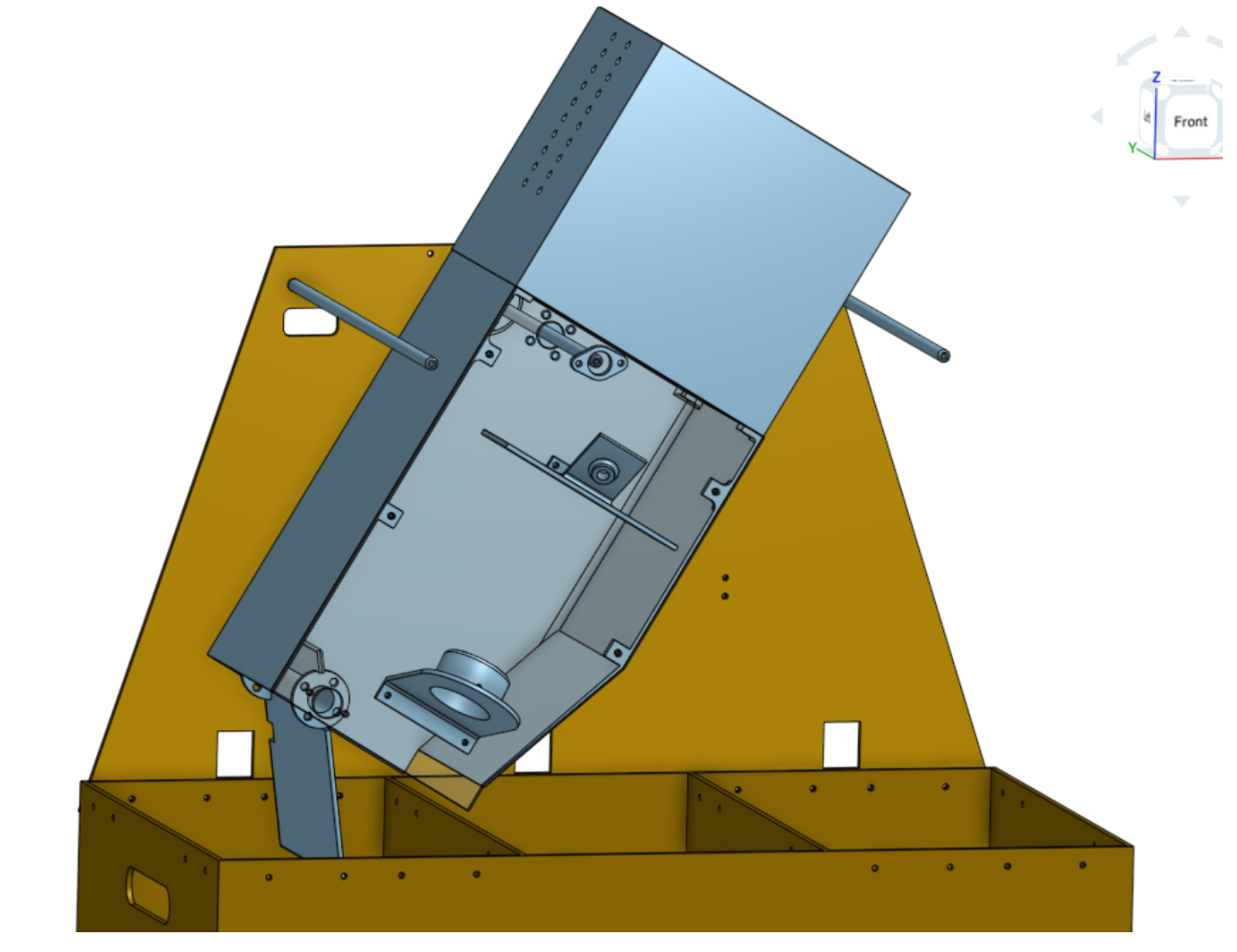
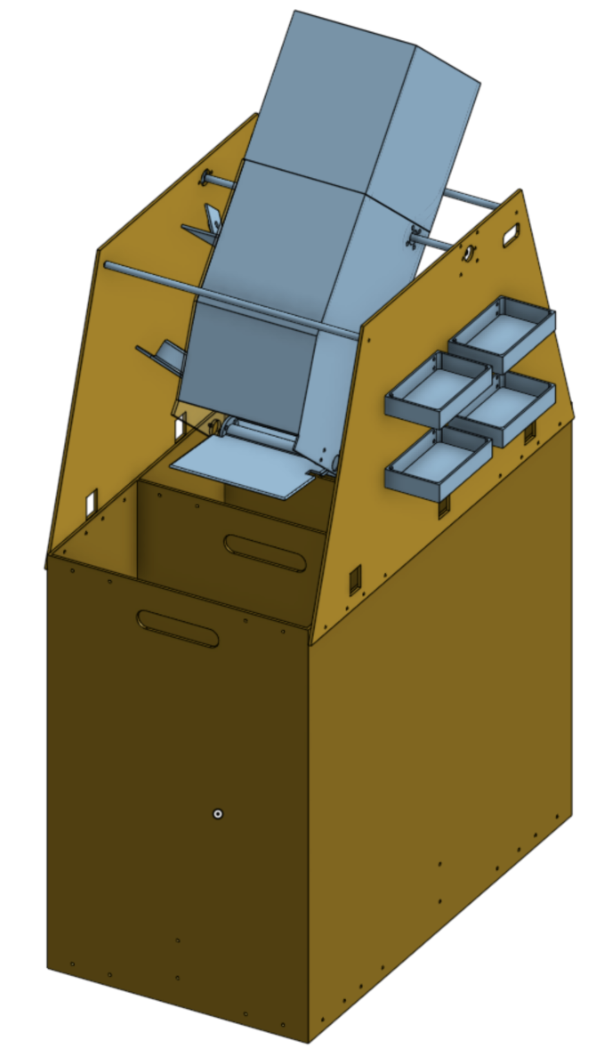
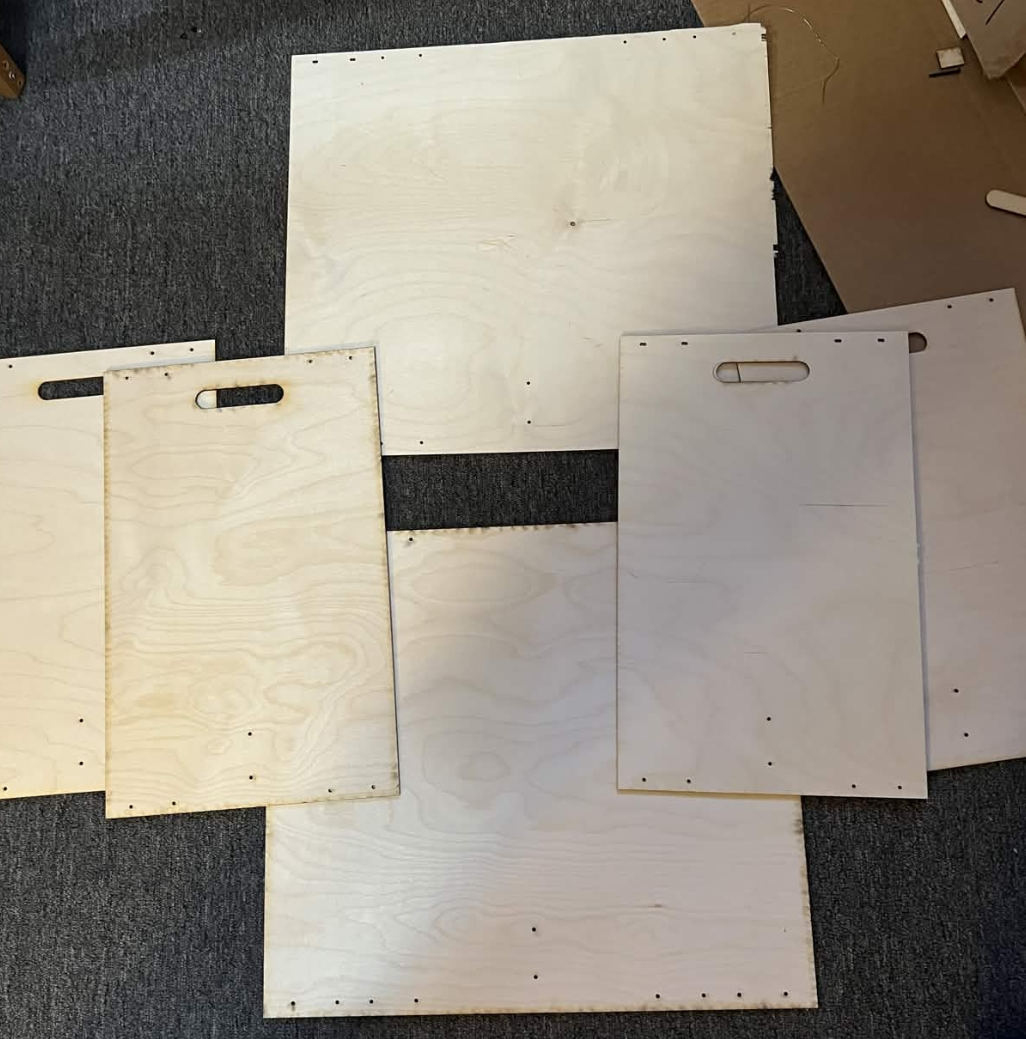
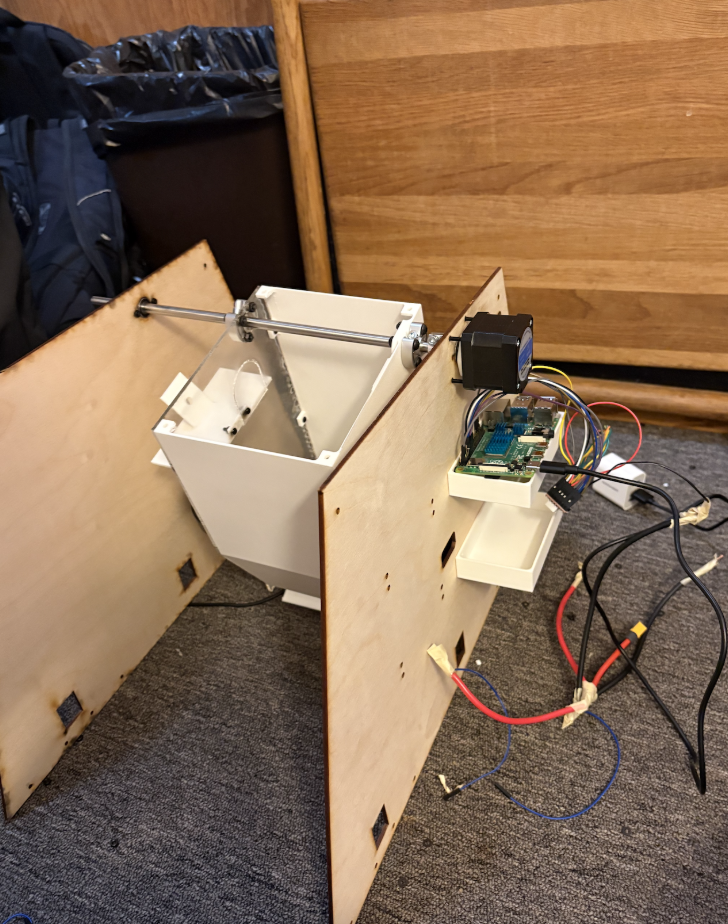
Alex DuOur project is an automated waste-sorting system that uses a motorized pendulum and computer vision to classify and sort disposal items. We developed a custom image classification pipeline based on MobileNetV3, which we optimized by masking trash datasets onto our specific background using SAM3 to ensure the model performed reliably in our environment.
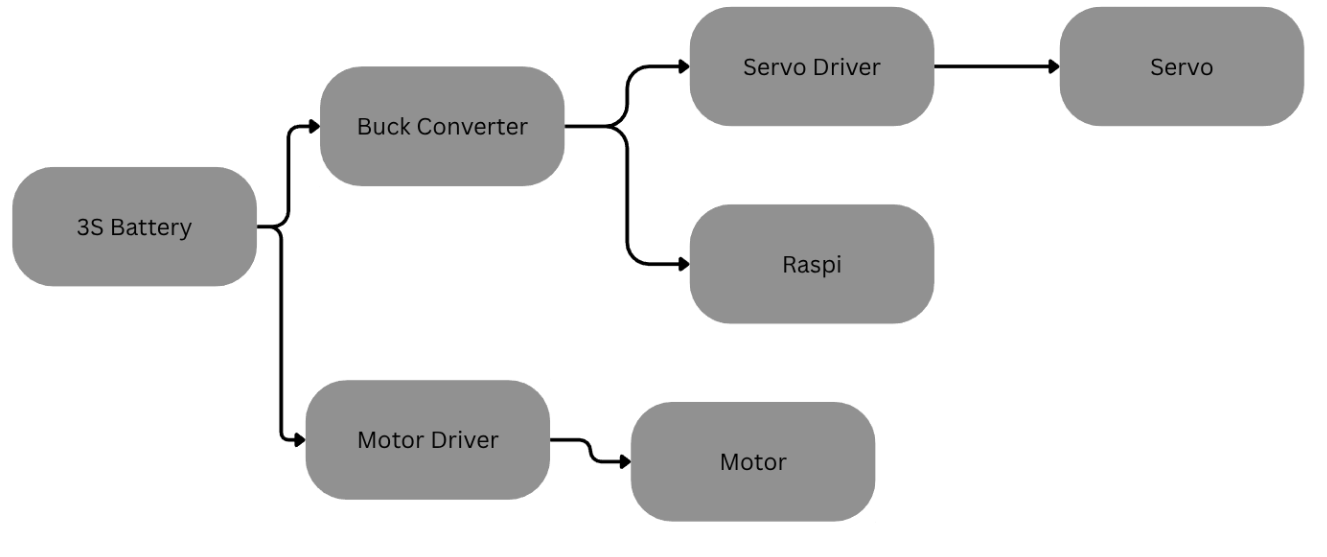
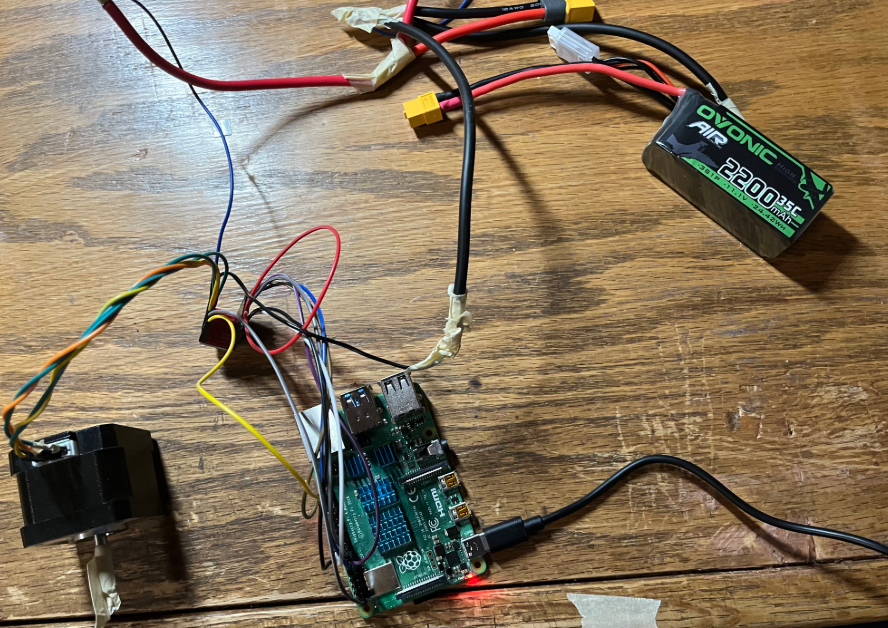
On the hardware side, we tuned the motor’s motion profiles and counterweighting to handle the increased moment of inertia from heavier trash, successfully balancing the system for a wide range of common waste. Despite some hardware challenges, including a blown buck converter, we successfully integrated the vision and motor control code into a functional prototype capable of an 80-90% success rate.


 Guido - IW5ALZ
Guido - IW5ALZ
 Adrian Prinz
Adrian Prinz
 Tobias
Tobias
 Daniel Resio
Daniel Resio