 Tony Goacher
Tony GoacherThere's a video on this part of the build here.
Testing had previously highlighted two issues:
- The 'track' of the tracks (the distance between the tracks themselves) was not wide enough, resulting in the TrakTrike tipping over. The fix for this was pretty simple: just make it wider.
- There was insufficient torque to get the vehicle starting reliably..
To fix the first I started by removing the track mounting plates.

And then cut and notched a longer square section to fit over the round bar chassis.

And then welded this longer section back onto the chassis.
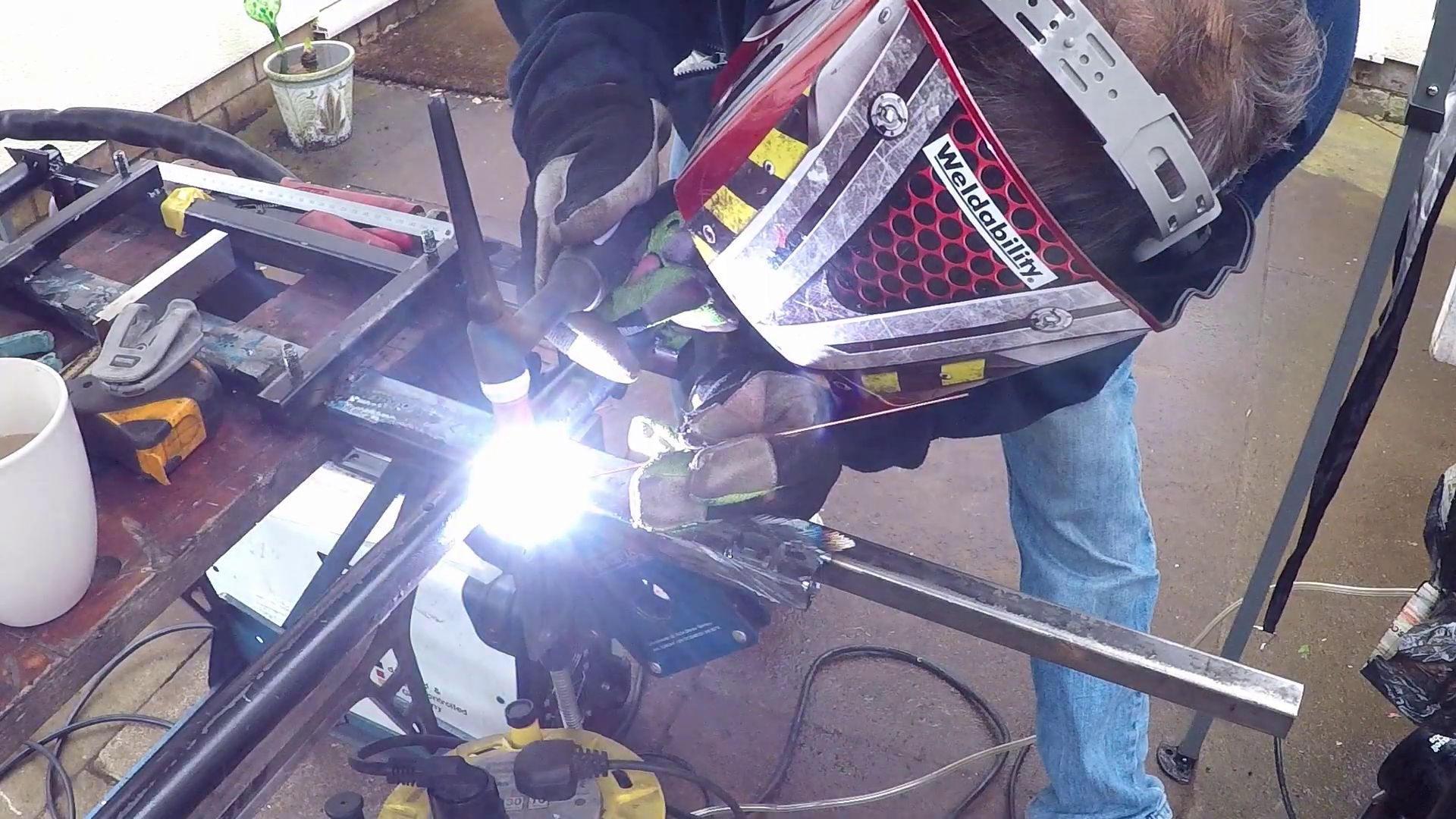
It's noticeably wider with this in place. Fortunately I checked the new width with that of my cars boot/trunk before committing.
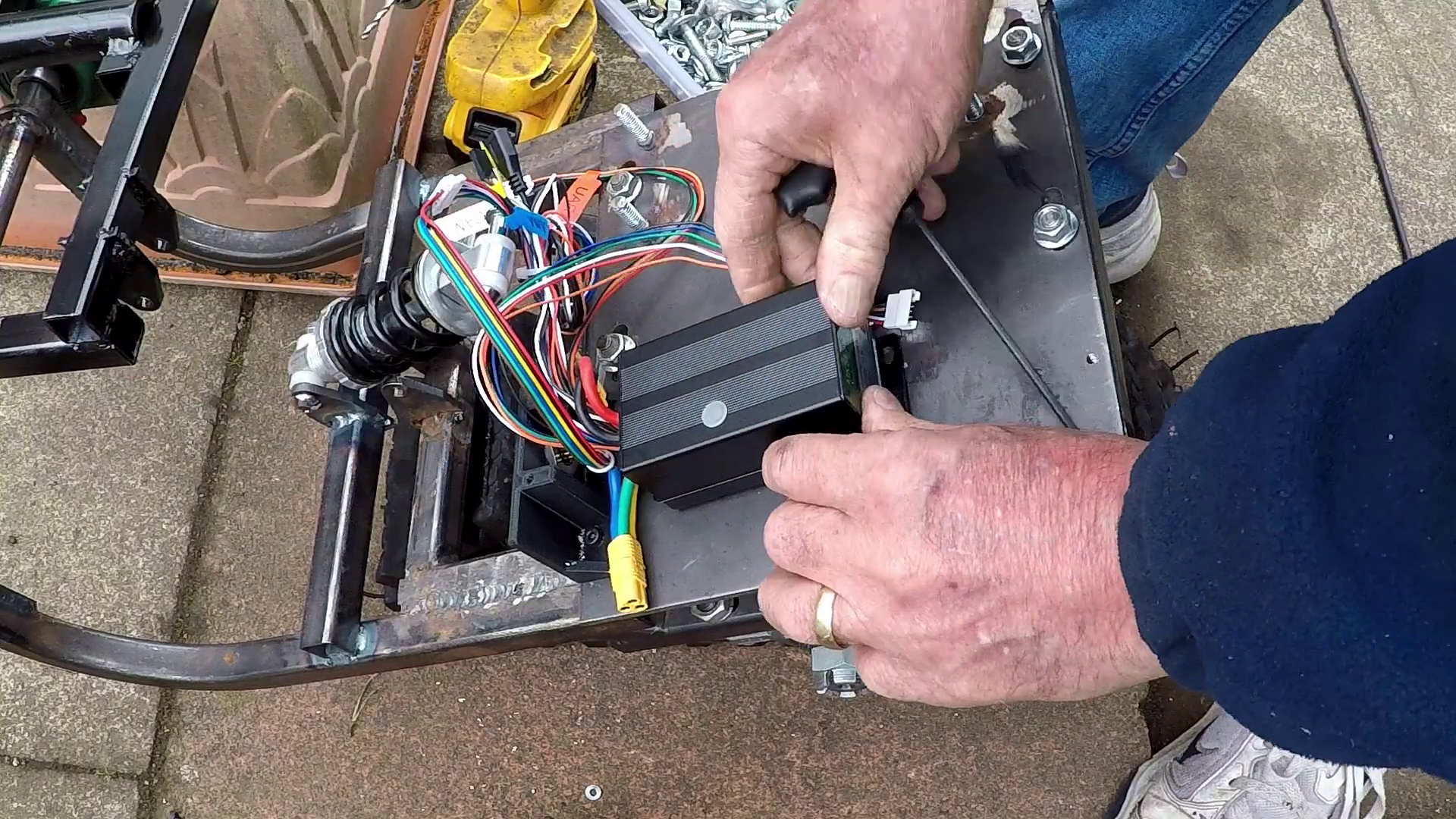
In an attempt to improve starting I swapped out the stock motor controller for more sophisticated VESC 75100 clone. These have a serial PC interface that allows acceleration and power settings to be configured.
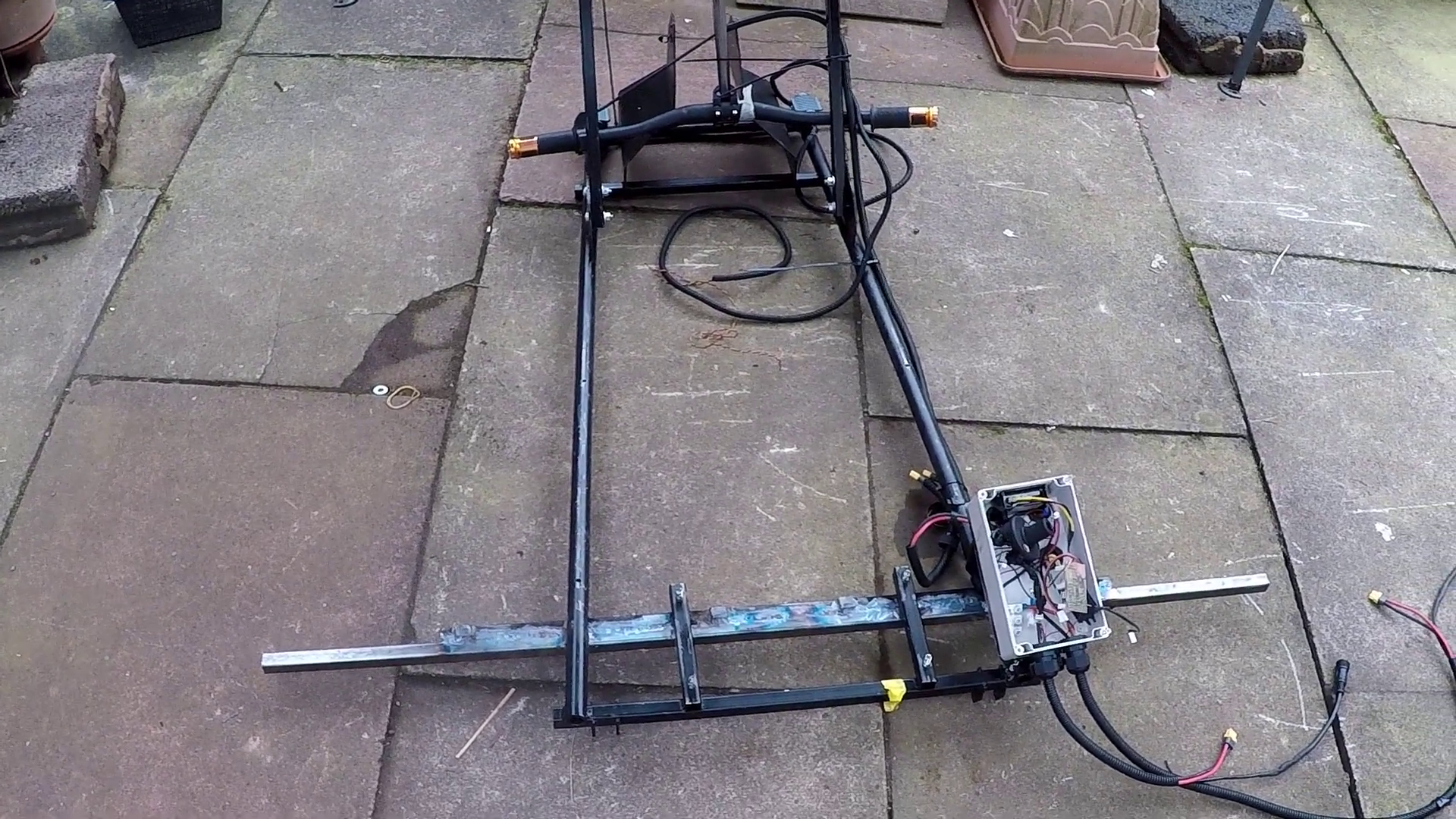
And so with these changes it was time for another test.

Stability was massively improved and starting seemed better, but still not quite right. I definitely had fun during the test though.

I'll just tweak the motor controller settings a little. And that was it. Both controllers failed. Didn't even show up as a serial port in the configuration software.
So with 2 weeks to go to EMF camp, I'm getting worried.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.