 Prashant Sinha
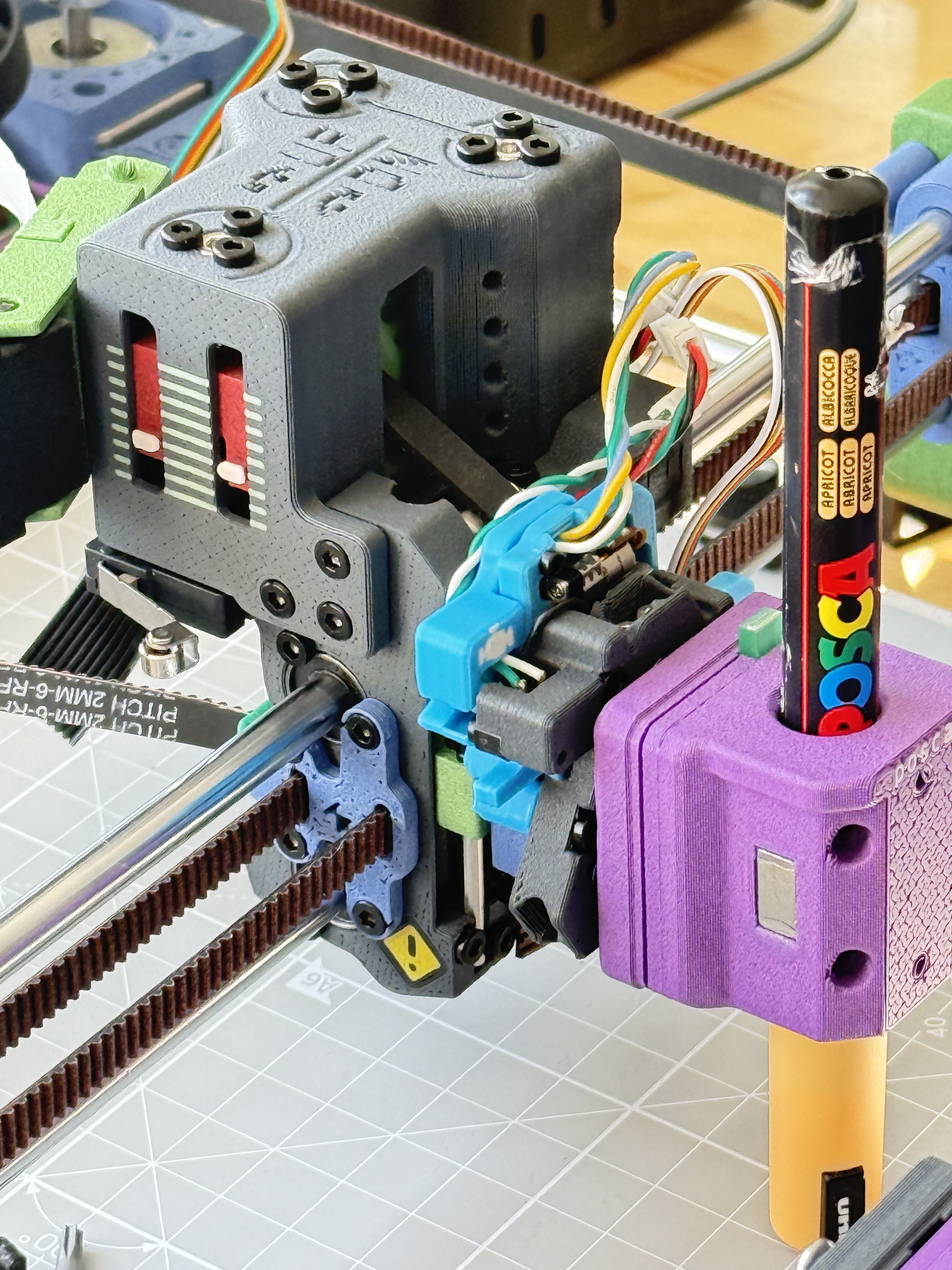
Prashant SinhaFor a plotter we do not really need large Z axis movement. Initial iterations used a MG14 servo motor for Pen Up/Pen Down motion. It worked but was loud, imprecise, and limited to flat bed.
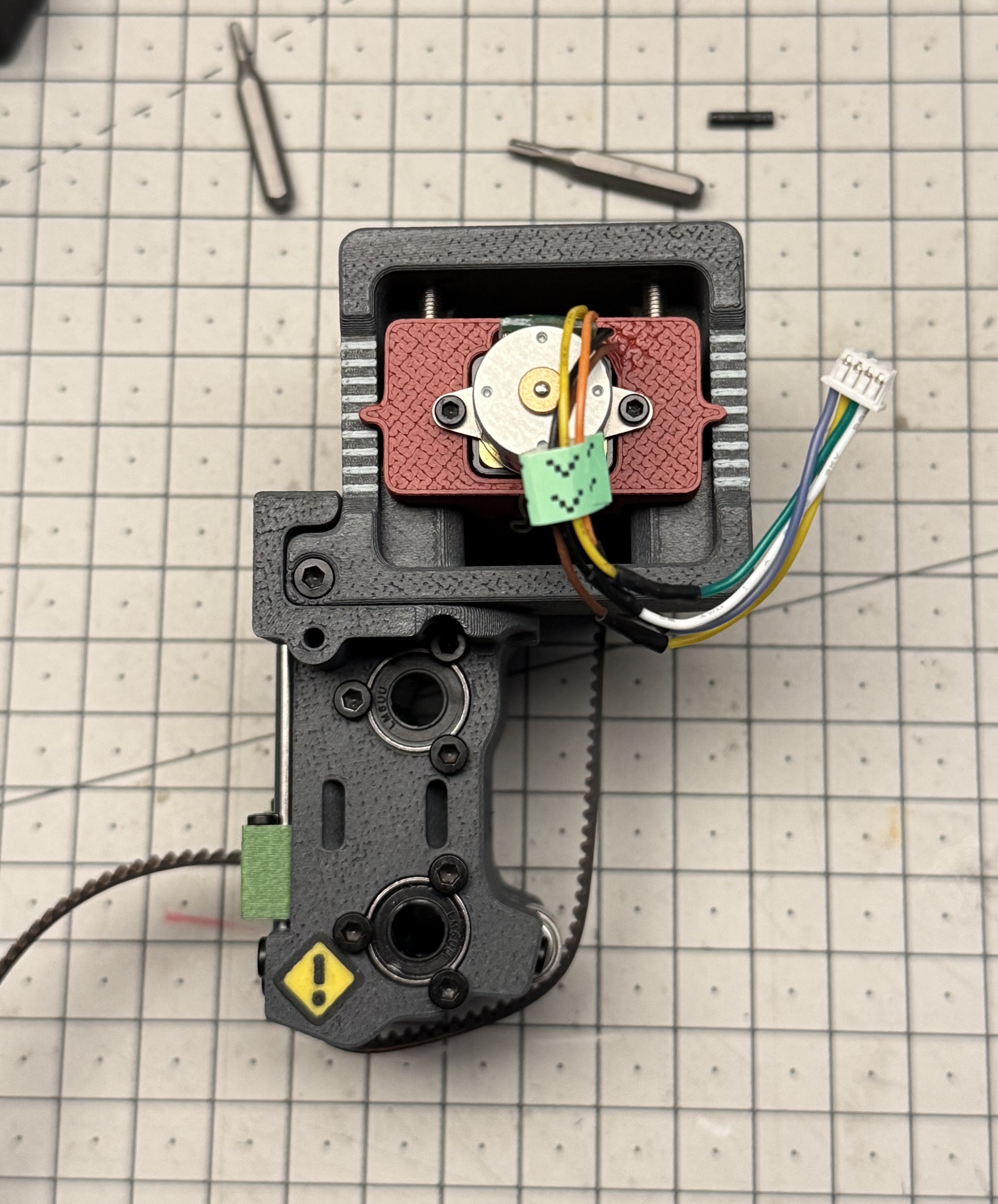
I found that SRM1509 stepper motors were just strong enough while being small and are what in use currently. These use a gearbox so some trial and error yielded a close but incorrect Z scaling. Additionally there is significant play due to gears and I had to account for the backlash.
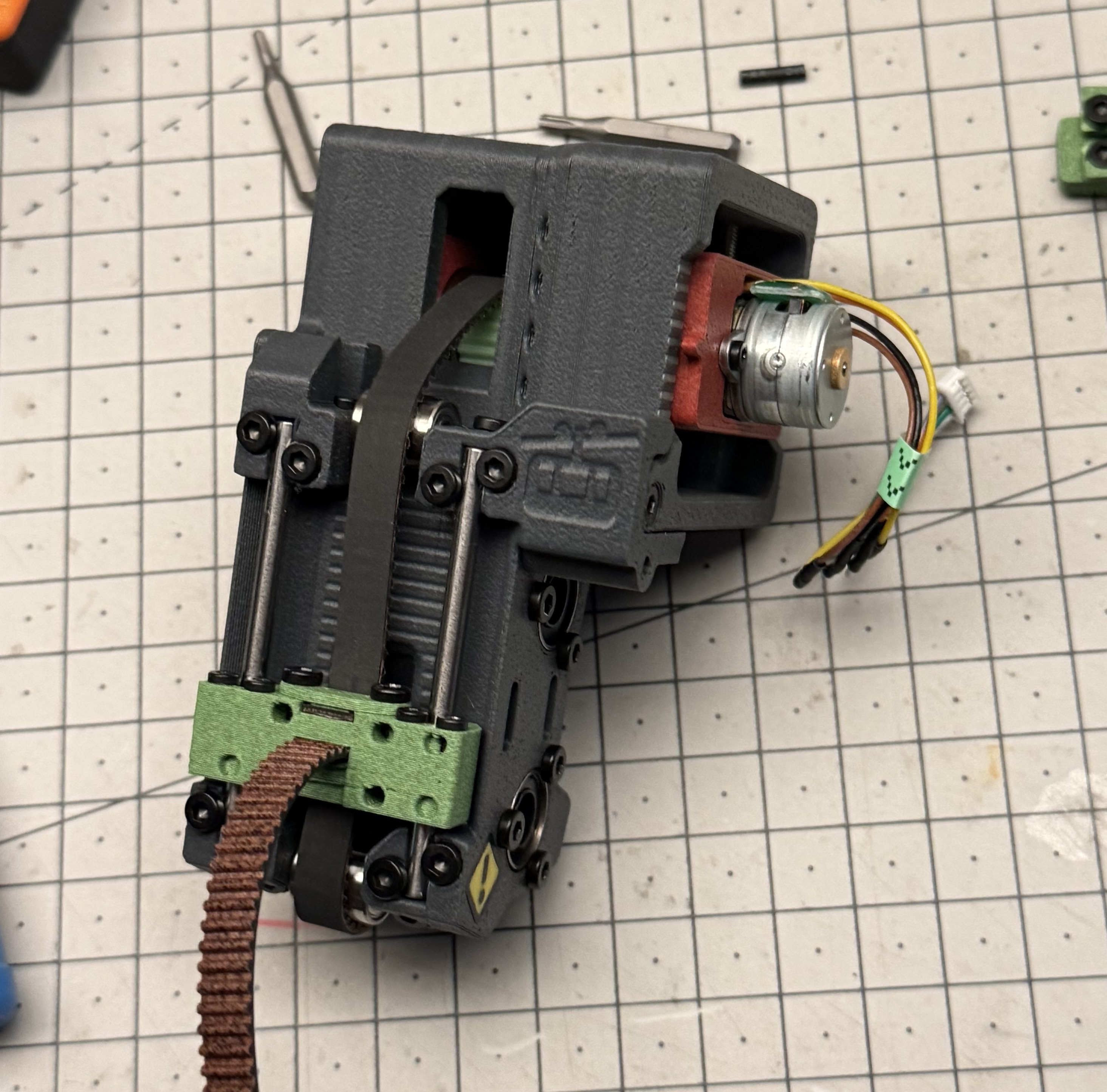
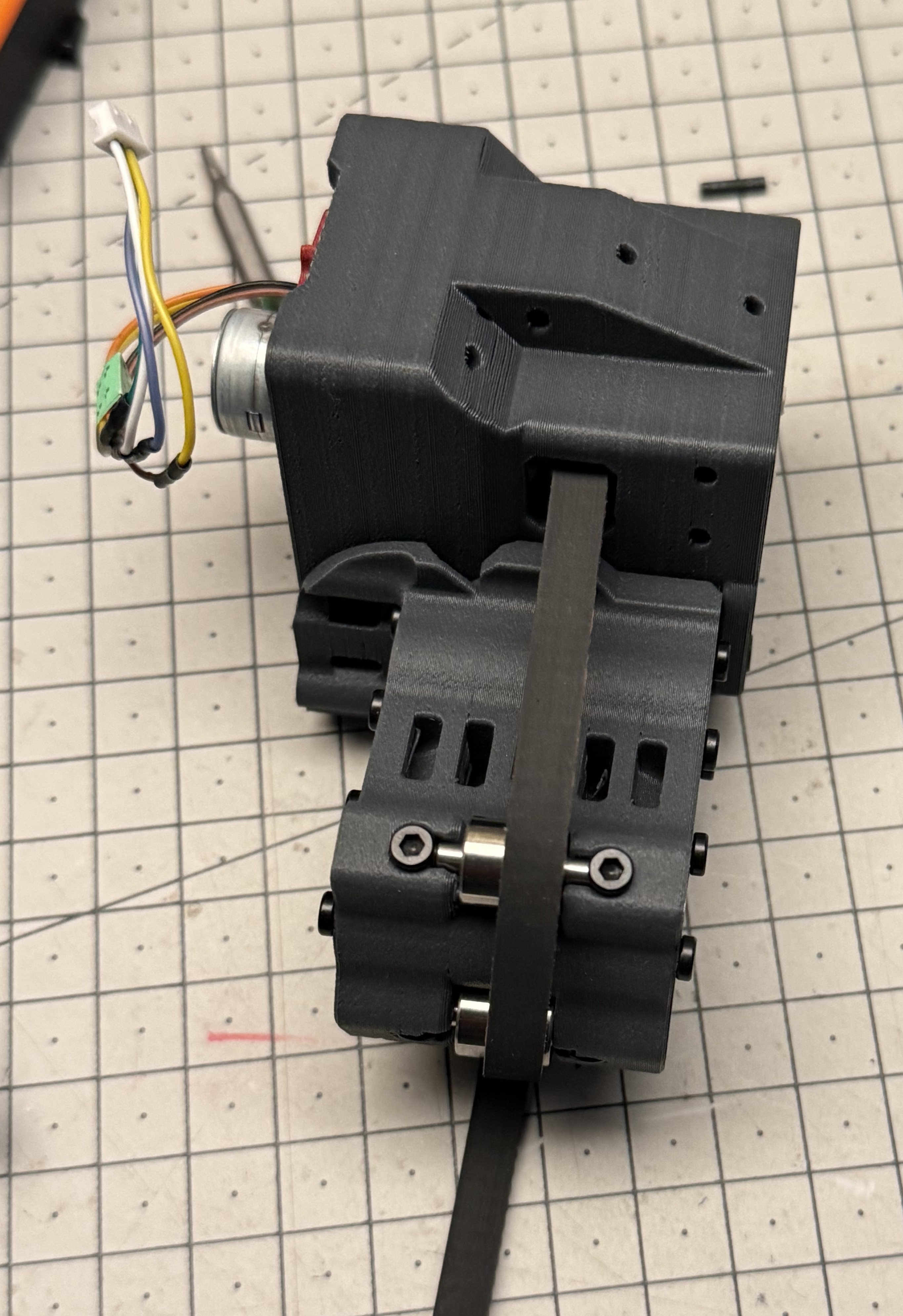
The motor module is designed separately so can be changed for a different system later. I plan to switch to NEMA8/NEMA11 motors soon. Currently the belt tension is achieved through three bolts that lift the entire motor and GT2 pulley assembly.
For the motion system 3mm/5cm dowels and bushings are used. Belt rides on 603ZZ bearings. When tensioned, the motor module and Y axis "rider" are rigid. Weighs about 250g!
Attached some pictures.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.