 Silícios Lab
Silícios LabNever forget to feed your fish again and with the right amount, at the right time.
Regular feeding is one of the most important factors for the health and growth of fish, whether in home aquariums or larger breeding systems. However, maintaining this consistency manually is not always practical, especially in busy routines or during periods of absence.
With this in mind, this project presents an automatic feeder developed with 3D printing, designed to be simple, efficient, and accessible. Using a mechanism based on a conveyor screw (Archimedes screw) driven by a servomotor, the system allows precise control of the amount of feed dispensed.
In addition to solving a common problem, the project also opens up possibilities for more advanced applications, being able to be integrated with different forms of control from simple drives to automations with microcontrollers and connected systems.
Throughout this article, you will understand how the device works, how it was structured in the 3D modeling, and what control possibilities exist to adapt the system to your needs.
System Operation
The feeder's operation is based on a simple and highly efficient mechanical principle: the transport of material by means of an Archimedes screw. This mechanism is widely used in industry to move grains, powders, and small solids—and here it has been adapted to dose feed in a controlled manner.
Inside the device, the feed is stored in a reservoir positioned at the top. This reservoir has an opening that allows the feed to fall into a pipe where the conveyor screw is housed.
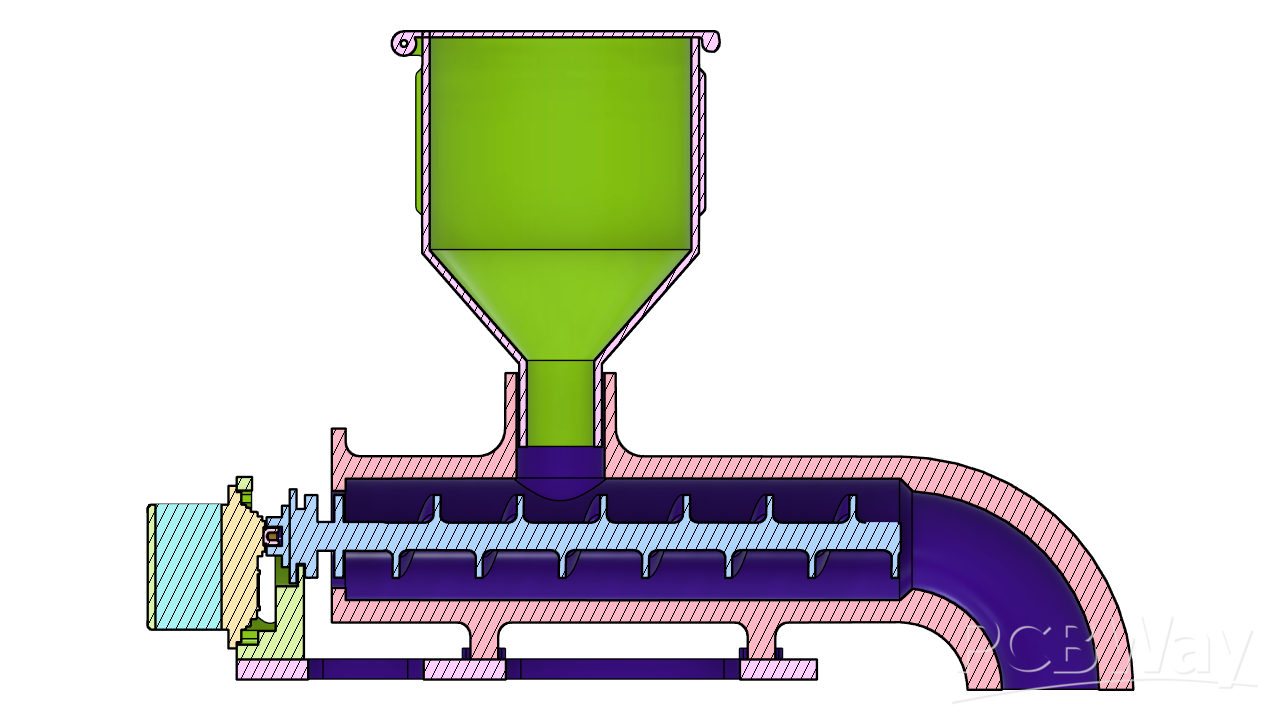 When the servomotor MG995 is activated, it transmits rotation to the screw. As the screw rotates, it pushes the feed along the piping to the system outlet. This movement occurs continuously and in a controlled manner, ensuring that the feed is released gradually, and not all at once.
When the servomotor MG995 is activated, it transmits rotation to the screw. As the screw rotates, it pushes the feed along the piping to the system outlet. This movement occurs continuously and in a controlled manner, ensuring that the feed is released gradually, and not all at once.
The great advantage of this type of mechanism lies in its predictability: the amount of feed released is directly related to the time (or angle) of rotation of the screw. In other words, the longer the motor remains rotating, the greater the amount of feed dispensed.
The system is controlled by a PWM (pulse width modulation) signal, which defines the position of the servomotor. Depending on how this control is implemented, it is possible to rotate the screw for a specific time or position it at specific angles, directly influencing the dosage.
In practice, the operating cycle works as follows:
- The feed remains stored in the reservoir.
- When the system is activated, the servomotor rotates.
- The screw transports the feed through the piping.
- The feed is released at the outlet, ready for consumption by the fish.
This model ensures more uniform feeding, reduces waste, and allows for fine adjustments according to the type and size of feed used.
3D Structure and Modeling
The project was developed focusing on simplicity, efficiency, and ease of manufacturing through 3D printing. The entire structure was designed to be modular, allowing for intuitive assembly, simple maintenance, and possible adaptations as needed by the user.
The feeder's architecture is composed of several main elements: the feed reservoir, the transport tubing, the Archimedes screw, the structural base, and the servomotor support. Each of these parts has a specific role in the system's operation and was modeled considering the limitations and best practices of 3D printing.
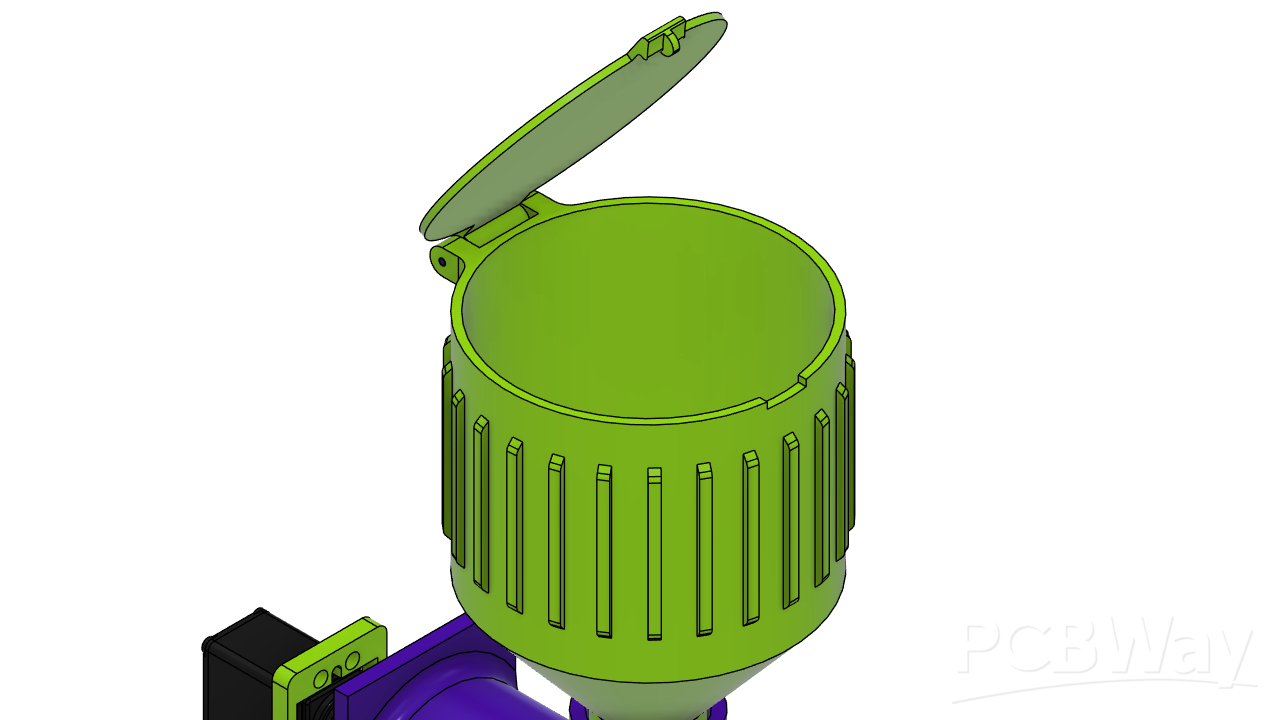
The reservoir was designed to store the feed and consistently direct it to the system's inlet. The internal geometry prevents accumulation and facilitates the flow of material by gravity, reducing the risk of feeding failures. The reservoir lid was integrated into the body by means of a hinge, allowing for practical opening and closing. To form the axis of this hinge and ensure rotation, it is necessary to insert a piece of filament approximately 30 mm long, which acts as an articulation pin.
The piping is the channel through which the feed...
Read more »