Benjamin Prescher
Benjamin Prescher-
Update II
08/06/2018 at 15:07 • 0 commentsUp in the air! After serveral hours of work I would like to complete the project at the current state. The quadcopter flies well, the algorithms perform as desired. Yeah!
Based on the prototype and the experiences gained here, I would now like to create an open-source project. I am going to create my own flight controller (PCB & software) and littly by little, I will introduce my new project here on hackaday.io.
This project will feature the latest C2000 controller F280049 from Texas Instruments as well as the new ICM20689 Gyro/Accel from Invensense. The follow-up project is about to start - stay tuned!
-
Update I
09/07/2017 at 15:23 • 0 commentsAfter finishing my master thesis there was some time to keep up with the quadcopter booster pack.
So far, I get well scaled angles using the MPU9250 and the Madgwick algorithm. In the same way, the remote control signals can be read in via the UART interface using Flysky IBUS protocol. In the next step, I will initialize the PID controllers and PWM peripheral to control the ESCs.
![]()
![]()
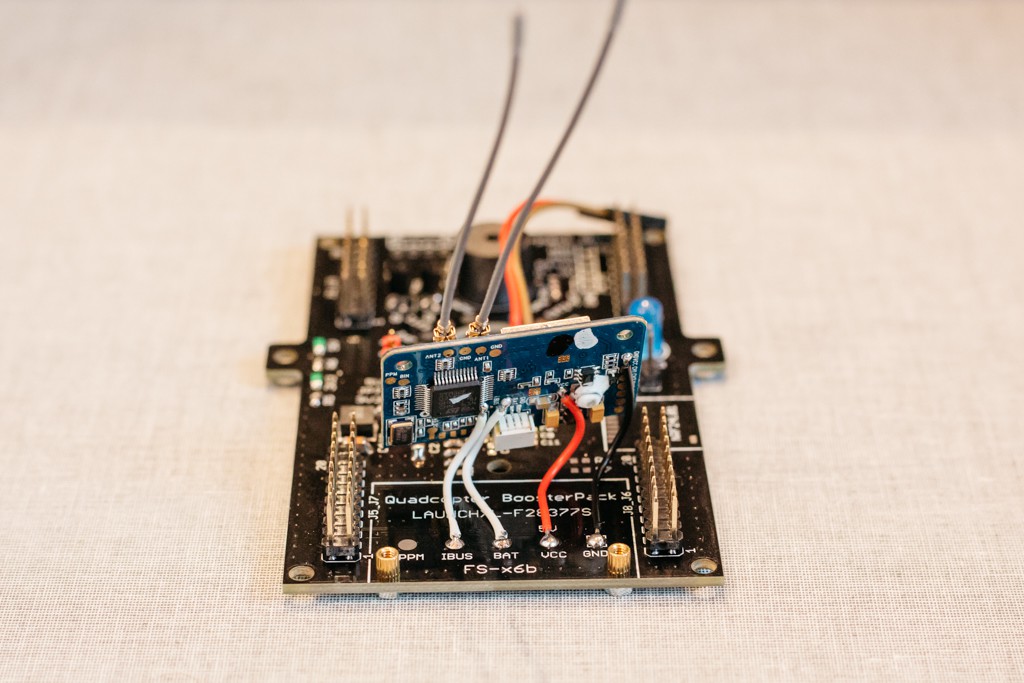
TI F28377S Quadcopter Boosterpack
Learn to fly your Quadcopter with TI C2000 Microcontroller