 Morning.Star
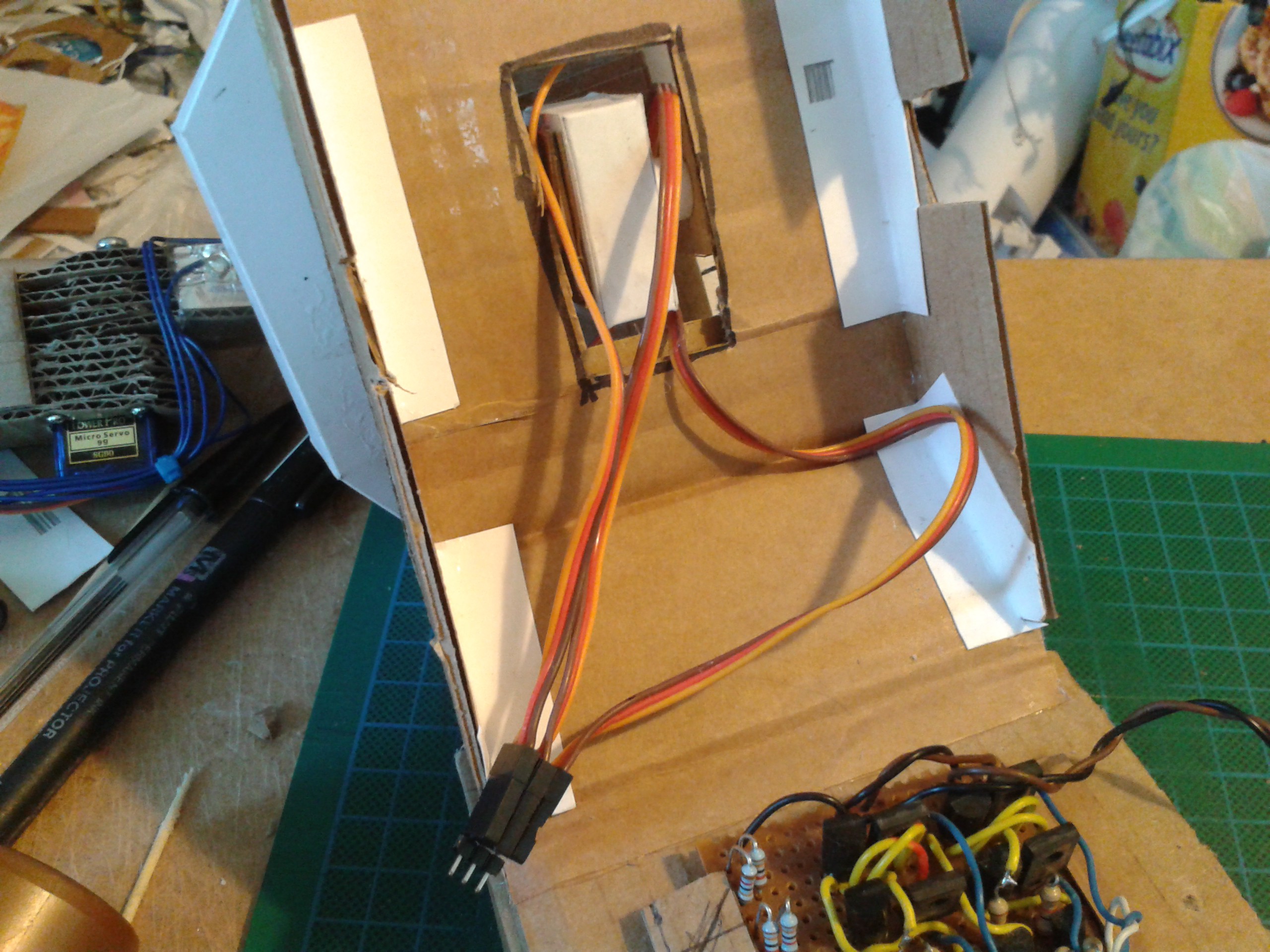
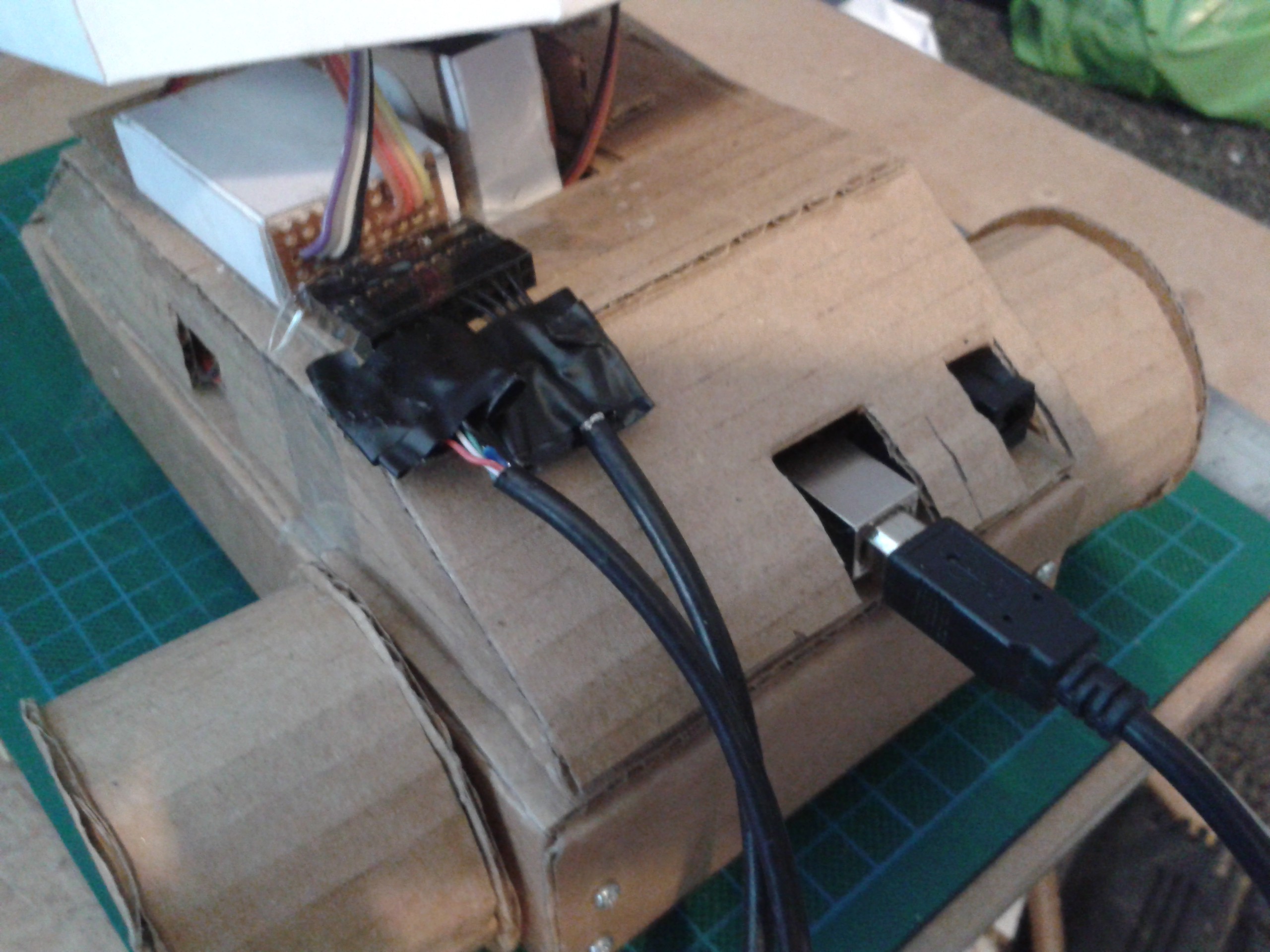
Morning.StarNow all the infrastructure is built, I can start putting the systems together. First thing is run all the power and signal cables a bit more neatly so they dont interfere with the mechanisms.
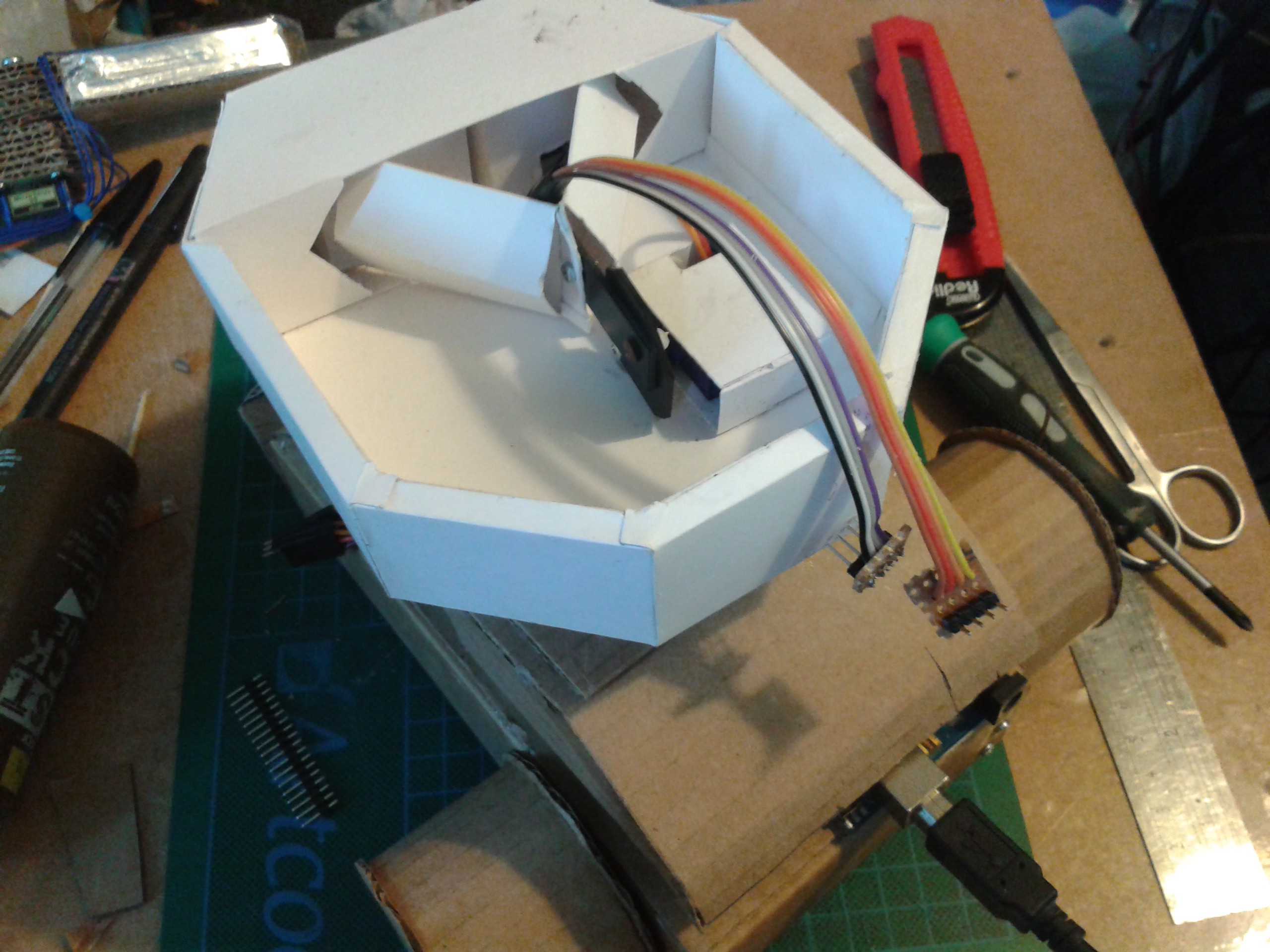
Plenty of room to bring cables down through the neck joint.
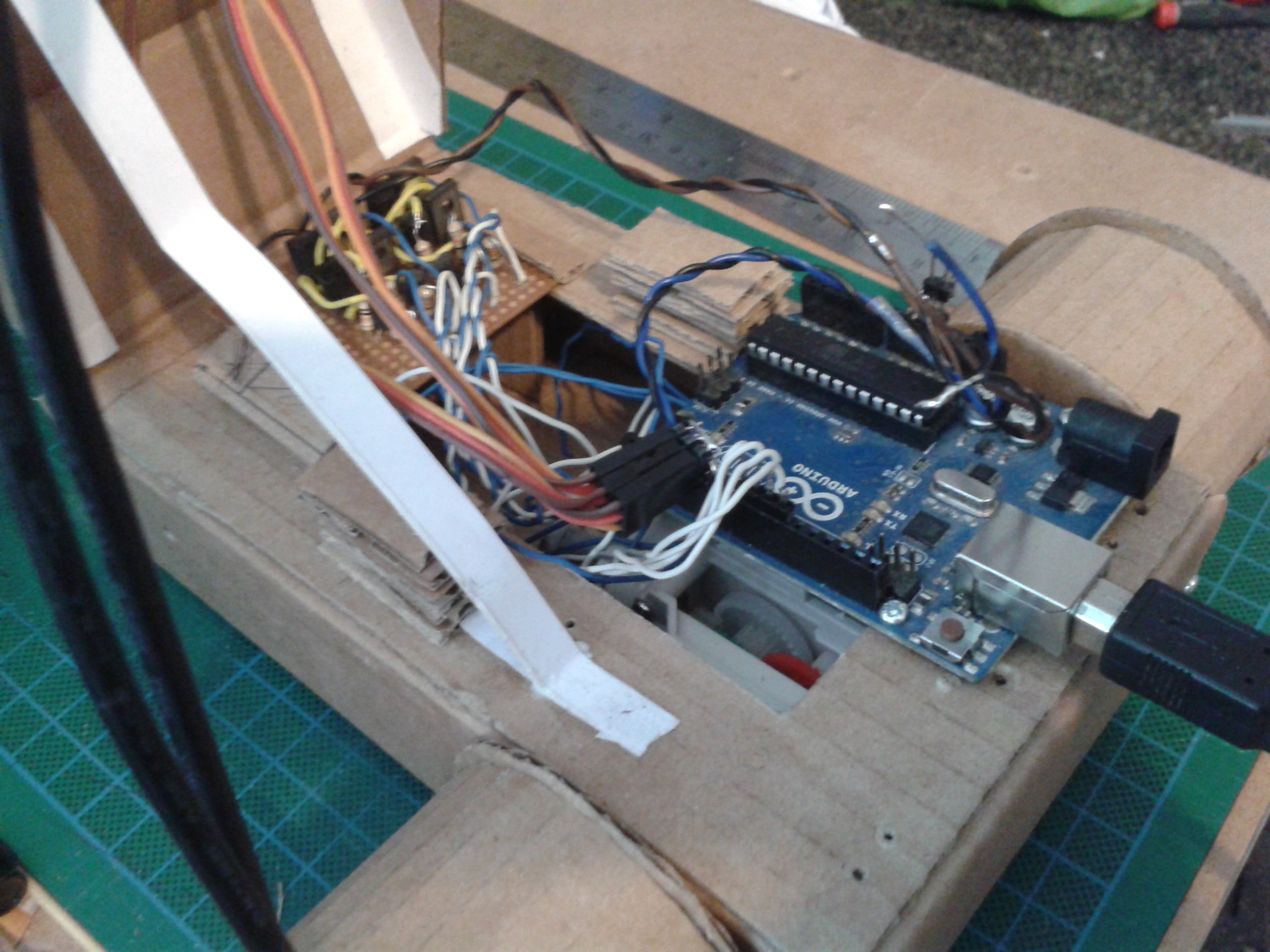
Thats a pair of H-Bridges I built ages ago to experiment with. The resistors on the left are a voltage divider for a series of bump-switches, they arent being used.
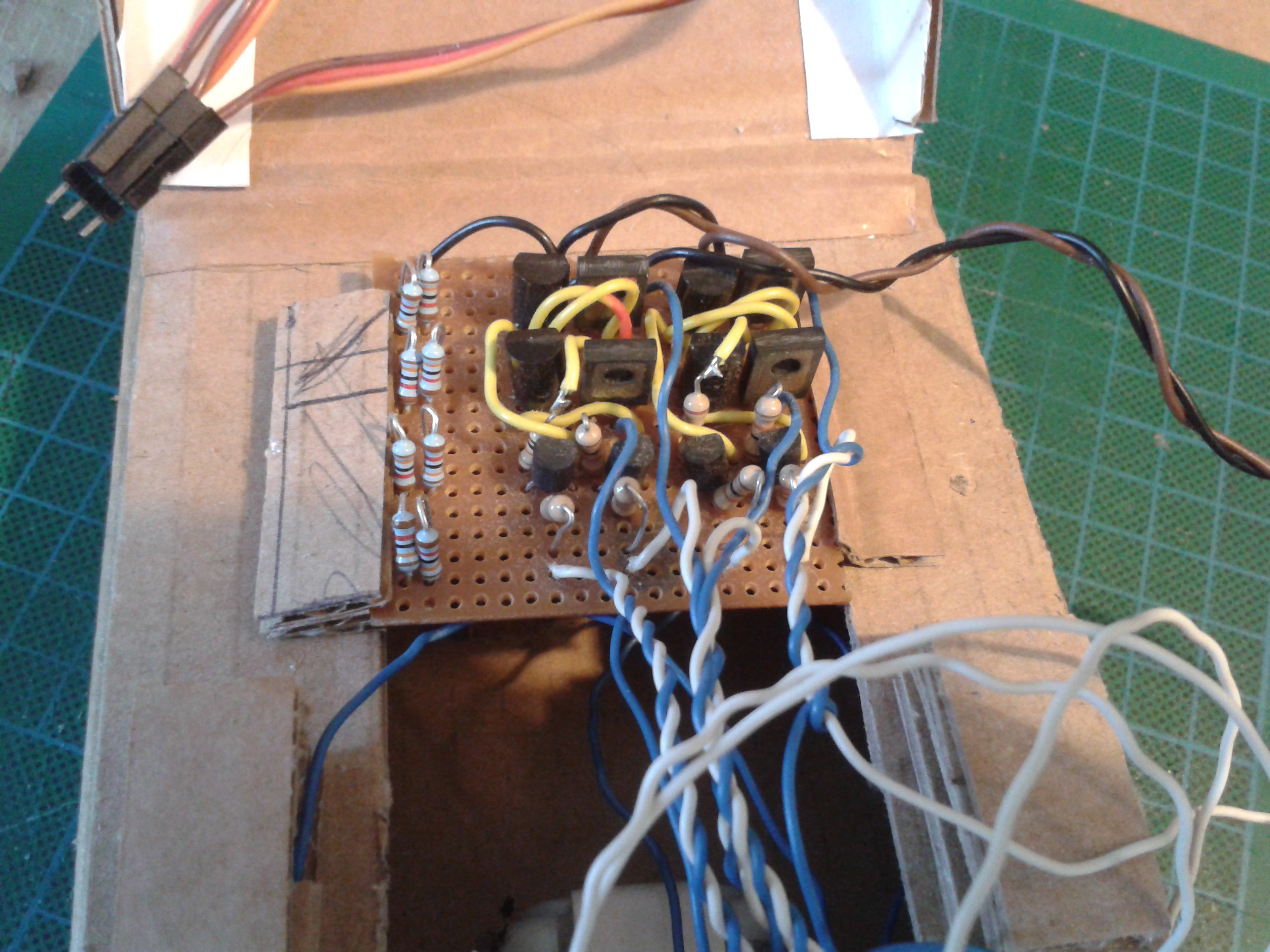
Both the motors are wired into the bridges for testing.
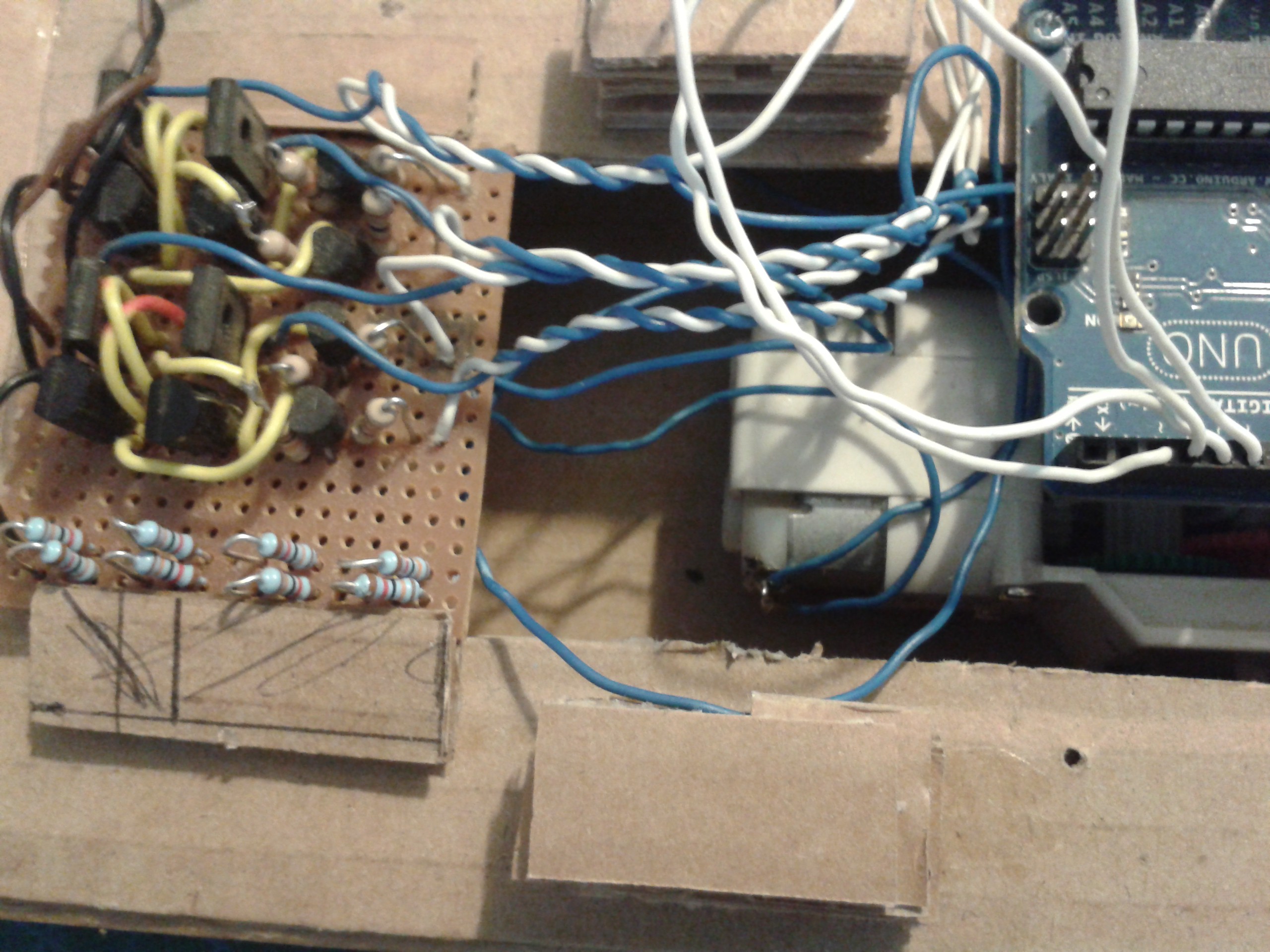
Add the neck and eye servos, tidy up all the wiring - make sure that all the grounds are commoned and add a strap for the lid. All it needs now is a host computer and a power supply for the motors and its ready to roll.
Wire in the cameras and its ready for testing - once I find some decent axles. I'll have to glue these into the track hubs and put a circlip on each to stop them from coming back out again as I really dont want to use those kebab sticks...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.