 Norbert Heinz
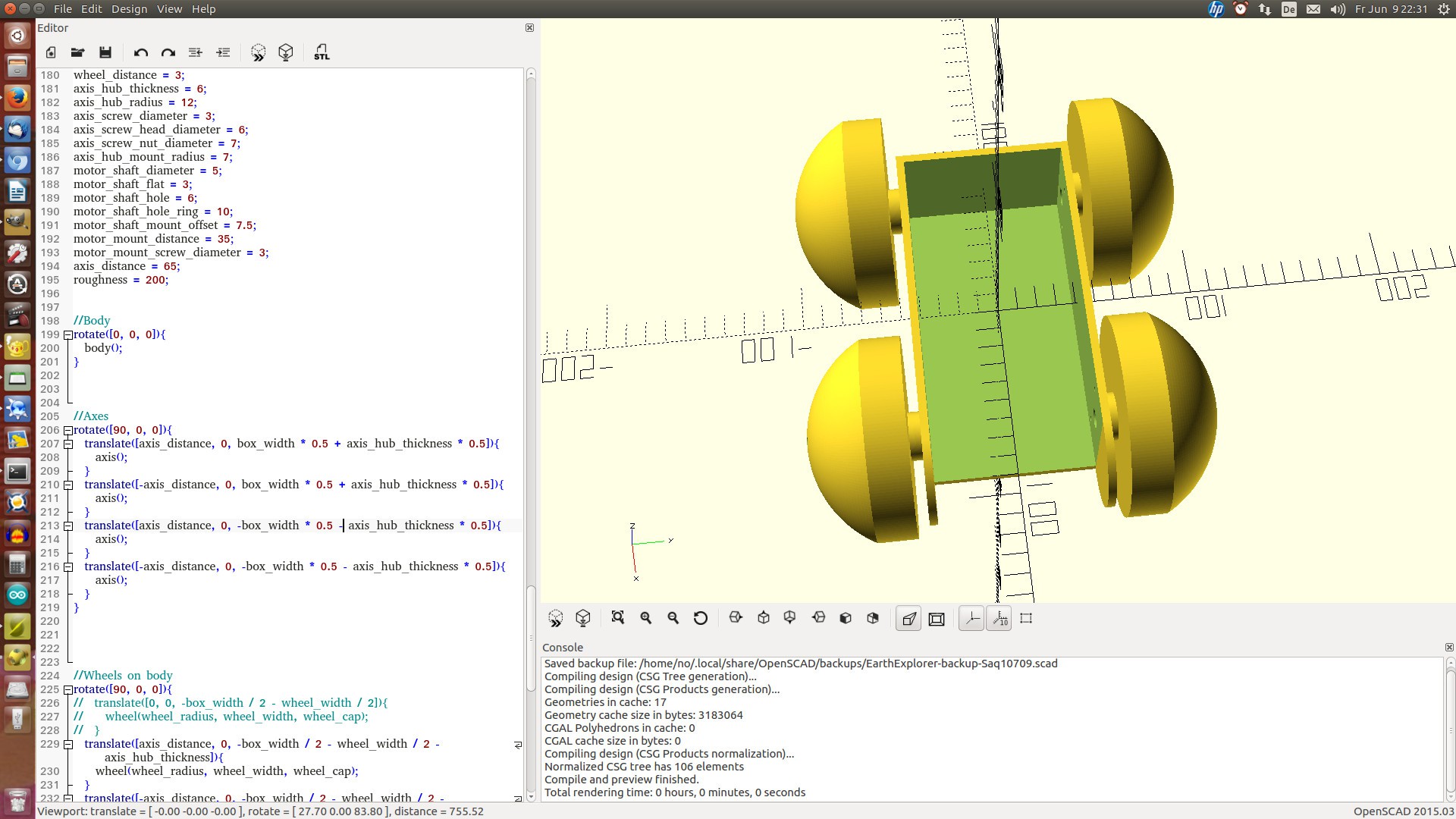
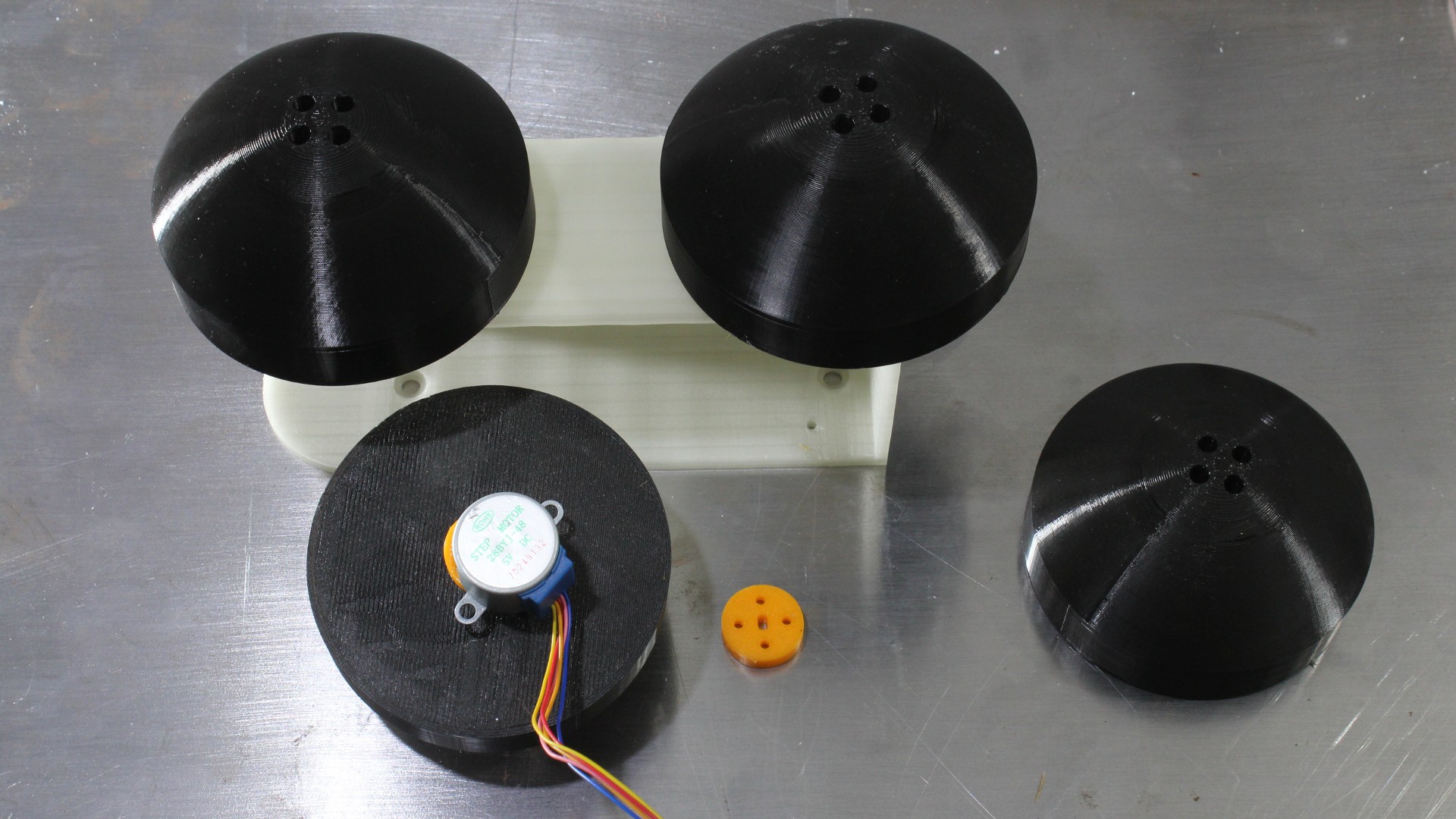
Norbert HeinzThe conceptual design was a 6 wheeler, but now my earth explorer comes with only 4 wheels having a radius of 10cm.Looks like the torque of the geared motors is sufficient to move the rover with low speed on flat ground. Tests will show what slope the rover can climb. Even if only a few parts are printed yet, there are changes in the design. The wheel hub has been changed to fit more tightly on the axis of the motor. For best results, minor changes on the body were made, too.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.